レガシーなUARTは簡単に使えるマイコン開発者でも、BLE:Bluetooth Low Energyは、新しくかつ仕様も追加されつつあるので手を出しにくいものです。しかし、いざBLEを仕事で使う段になれば、いつものように、厳しいスケジュールでの開発が要求されます。
そのような開発者個人が、入手性が良いマイコン:MCUで電波法の縛りがある日本国内でBLE通信を自習する方法を3つ紹介します。
BLE習得3方法
仕事での開発と違い、個人でBLEの開発環境を整える場合は、「入手性とその金額」が問題になります。金額ベースで安い順に3方法を評価したのが下図です。
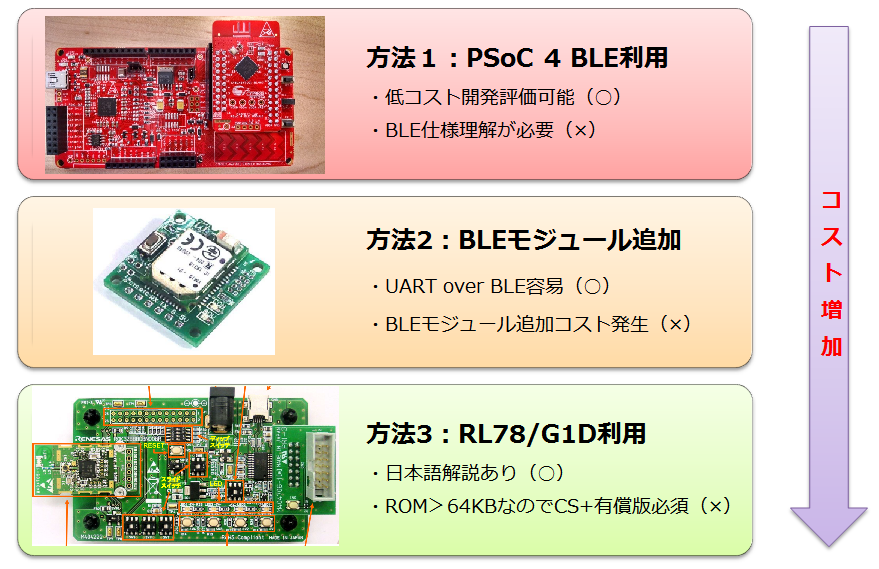
Cypress PSoC 4 BLE利用の方法1は、低コスト($49)で環境構築可能ですが、多少BLE仕様を理解する必要があります。しかし、BLEを習得するならお勧めの方法です。
BLEモジュール追加の方法2は、マイコンUART入出力にBLEモジュールを追加する方法です。
マイコン以外にBLEモジュールが必要なため、追加コスト(図示、浅草技研BLESrialの場合4000円)が必要ですが、BLEを無線のドカン(UART over BLE)として使えるので、BLEをブラックボックスとして扱えるのが魅力です。
方法1と方法2のコスト差は、使用マイコンにも依存するので大差ありませんが、後で示す仕様変更時に差が出ます。
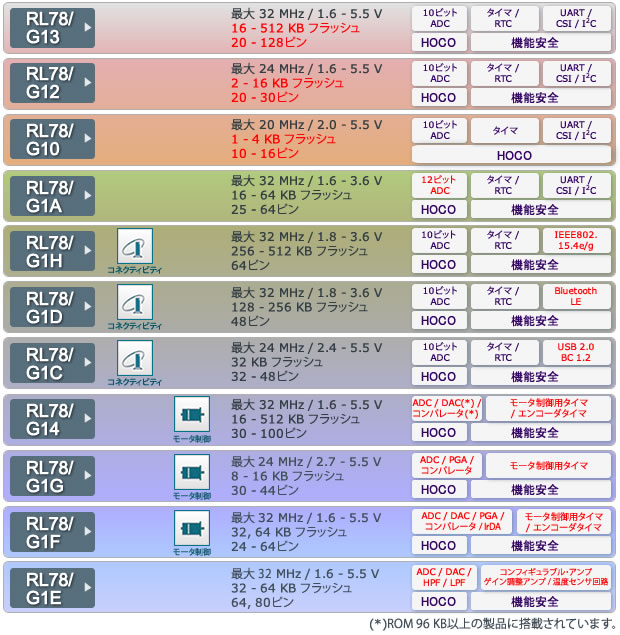
ルネサスRL78/G1D利用の方法3は、BLE機能を持つルネサスRL78マイコンを使うので技術資料が日本語ですが、開発には高価な有償版CS+と評価ボードが必要になります。RL78マイコンを仕事で使っている場合は、有利かもしれません。
BLE仕様が変わる現状への対処
マイコンBLEの通信相手は、前回示したMPU/SBCなどのIoT向けPCの他に、スマホが使えます。
スマホBLEには、「BLE 4.0/4.1/4.2など様々な仕様」があります。多くの通信仕様のように、下位互換性がありますが、セキュリティなどの機能強化が図られており、結果、対応マイコンにはますます大容量ROMや高性能化が要求されます。
このようなBLE仕様の変化や仕様追加に対して、PSoC 4 BLE: CY8CKIT-042-BLEは、実装CPUモジュール($15)の載せ替えで対応します(コチラの記事を参照)。一方、BLEモジュール追加の方法は、モジュール購入時で仕様が固まっているので、変更には対応モジュールの再購入が必要です。
総合評価結果
入手性とその金額、BLE仕様変更への対応から、PSoC 4 BLEを使った方法1が、コスト的にも、BLEに関するCypress日本語資料も少なからずありますので、個人でBLE習得するには最も優れた方法だと思います。
IoT時代は、UARTと同じレベルでBLEを使うことが必須です。仕事でせかされる前にBLE技術を習得しませんか? 弊社PSoC 4 BLEテンプレートもお役に立てると思います。