統合開発環境のデファクトスタンダードがEclipse IDE。本ブログ対象ベンダのNXP)MCUXpresso IDE、ルネサス)e2studio、Cypress)PSoC Creator、STM)SW4STM32など全てこのEclipse IDEをベースとした統合開発環境です。
ベンダやマイコンが変わっても殆ど同じ操作でエディットやデバッグができるので、慣れが早く、本来のソフトウェア開発に集中できます。但し、オープンソース開発なので、毎年機能追加や変更があり、2018年は6月にバージョン4.8、コードネームPhoton(光子の意味)への改版が予定されています。
本投稿は、2017年版Eclipse IDEバージョン4.7、Oxygenベースの各社IDEプロジェクトインポート、リネームの方法を説明します。
弊社マイコンテンプレートを使ってソフトウェア開発をする時、これらの操作を知っているとテンプレート:ひな型活用のプロジェクト開発がより簡単です。
IDEの例としてSW4STM32を用います。IDEは、Workspace:ワークスペースと呼ぶフォルダ単位で機能します。ワークスペース内には複数プロジェクトが存在でき、2重起動ができます。
プロジェクトImport
マイコンテンプレートは、テンプレートの具体的な応用例にシンプルテンプレートプロジェクトやBaseboardテンプレートプロジェクトをArchives形式で提供します。Archives形式は、配布に都合が良くEclipse IDEの標準方法ですので、IDEダイアログに従って操作すれば「複数の方法」でプロジェクトインポートができます。
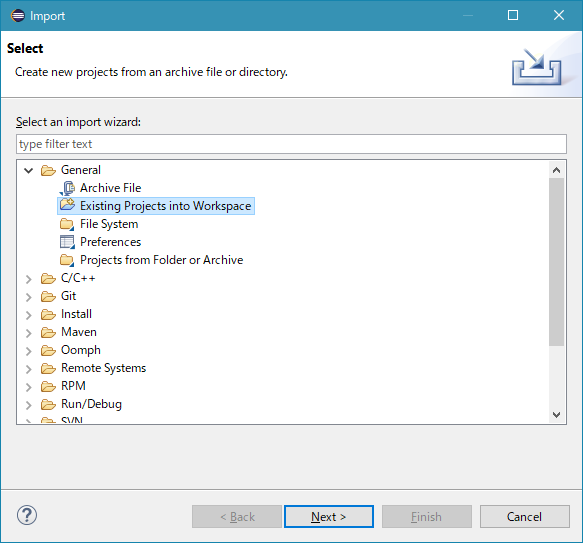
このArchiveプロジェクトの「最も簡単」なワークスペースへのインポート方法が下記です。
- Windowsで、Archiveを適当な場所で解凍 → 事前に作成したIDEワークスペースへ解凍フォルダ毎コピー
- IDEで、File>Import>General>Existing Projects into Workspace実行 → インポートProjects選択
IDEで直接Archivesプロジェクトを解凍しワークスペースへインポートすることもできますが、フォルダ選択などのダイアログ操作は面倒です。マルチプラットフォーム対応のEclipse IDEたるゆえんですが、WindowsかmacOSの上で使うのであれば、この方法が簡単です。
プロジェクト名Rename
※Rename後、Renameプロジェクトの再ビルドが失敗する場合があります。Rename前に、ワークスペース毎バックアップするなどの事前対策を実施後、Renameを実行してください。
ワークスペースに複数プロジェクトが存在するには、別々のプロジェクト名が必要です。例えば、シンプルテンプレートを使って開発したプロジェクトが既にあるワークスペースへ、もう一度シンプルテンプレートを使って新たなプロジェクトを追加作成する場合を考えます。
開発したプロジェクト名は、SimpleTemplateのままです。これをRenameしないと新たにシンプルテンプレートをインポートできません。この時は、開発したプロジェクト選択後、右ボタンクリックで表示されるメニューからRenameを選択し、別プロジェクト名に変更します。
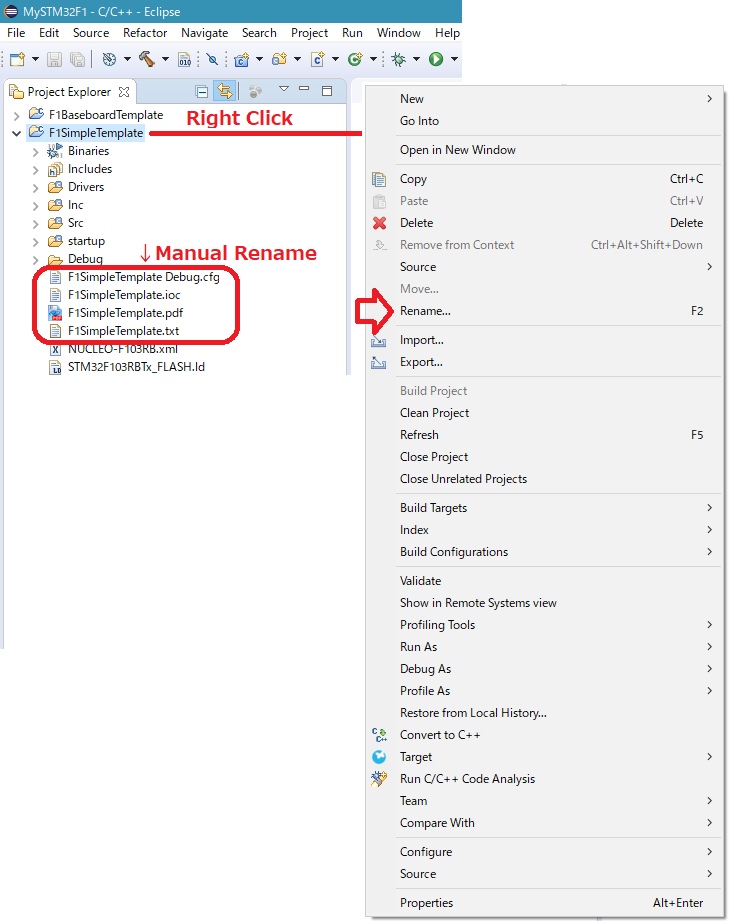
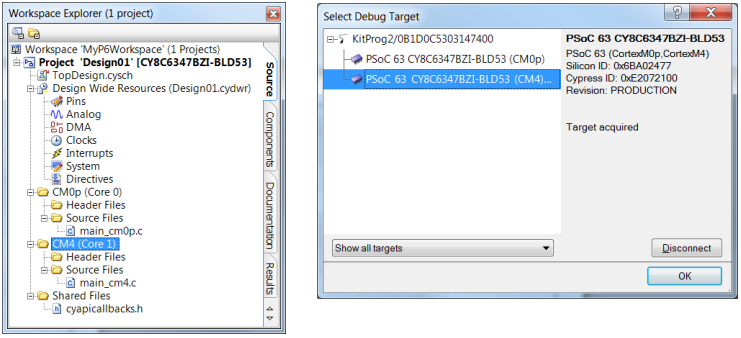
注意点は、この操作でプロジェクト名変更をIDEは認識しますが、IDE以外のツールで作成したファイル名などは、そのままとなる点です。図はSTM)SW4STM32の場合です。Debugフィルダ下の.cfg/ioc/pdf/txtの4ファイルがそれらです。これらファイルは、手動でのRenameが必要です。これを怠るとRenameしたプロジェクトの再ビルドやデバッグが失敗します。
これら手動Renameが必要なファイルは、各社のAPI生成ツールなどに関連したファイルで、他社IDEでも同様です。元々のEclipse IDE守備範囲外のこれらファイルは、プロジェクト名Rename時、手動Renameが必要ですので注意してください。
※Rename後、再ビルドが成功することを確認してください。再ビルドが失敗する場合には、プロジェクトフォルダ毎コピー&ペーストを実行し、ペースト時にRenameしたい別プロジェクト名を設定する方法でRenameを試してください。
別プロジェクトファイルのコピー、ペースト
別プロジェクトファイルを当該プロジェクトへコピー、ペーストする方法は、同じワークスペース内であれば簡単です。ファイル選択後、コピー:Ctrl+Cとペースト:Ctrl+Vでできます。
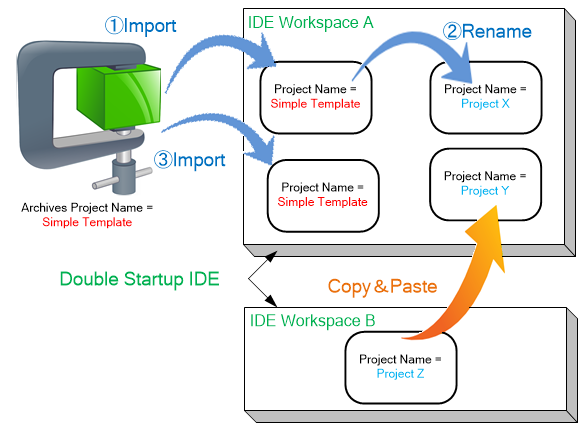
ワークスペースが異なる場合は、IDEの2重起動を使うとファイル選択ミスがありません。
IDEは、起動中でももう1つ同時起動が可能です。IDE起動時に、異なるワークスペース選択をすれば、コピー対象プロジェクトのファイルをIDEで目視しながら選択できます。もちろん、Windowsエクスプローラでファイルを直接選択しペーストも可能ですが、普段IDEで見慣れたファイル表示で選択する方がミスは少ないです。同一ファイル名の上書き前の確認も行います。
エクスプローラでファイル表示をすると、普段IDEで見慣れないファイルなども見られます。これらが選択のミスを生みます。IDEは、必要最低限のファイルのみ表示しているのです。
IDE画面のリセット
デバッグやコンソールなど複数Perspectiveを表示するIDE画面は、時に隠したPerspectiveを表示したくなります。PerspectiveをIDE初期状態に戻すのが、Window>Perspective>Reset Perspectiveです。
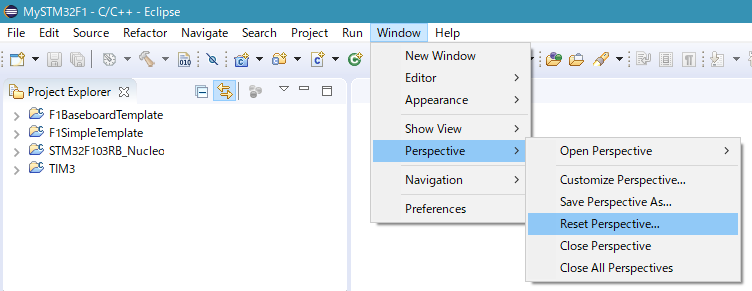
この方法を知っていると、使わないPerspectiveを気軽に非表示にできるので、画面の有効活用ができます。
まとめ
Eclipse IDEベースの各社開発環境で知っていると便利な使い方をまとめます。
- プロジェクトインポート:IDEのExisting Projects into Workspaceを使うと簡単
- プロジェクト名リネーム:自動リネームはEclipse IDE関連のみ。API生成ツール関連ファイルは手動リネーム要。
- 別プロジェクトファイルのコピー&ペースト:IDE2重起動を使い、ファイル選択ミスを防ぐ
- IDE画面リセット:利用頻度の低いPerspectiveを非表示にし、画面有効活用
マイコンテンプレート活用の最初の段階が、テンプレートプロジェクトのワークスペースへのインポートです。これらインポートしたテンプレートへ変更を加え、開発プロジェクトにします。
この開発プロジェクト名をリネームし、同じワークスペースへ、再びテンプレートプロジェクトをインポートします。ワークスペース内は、リネームした色々な既成開発プロジェクトから成り、様々なプロトタイピング開発へも応用できるでしょう。
ワークスペースが異なるファイル操作には、IDE2重起動でファイル選択のミスを防ぎます。
これらのTipsを知っていれば、既存資産を流用、活用し、本来のソフトウェアに集中しミスなくプロトタイピング開発ができます。