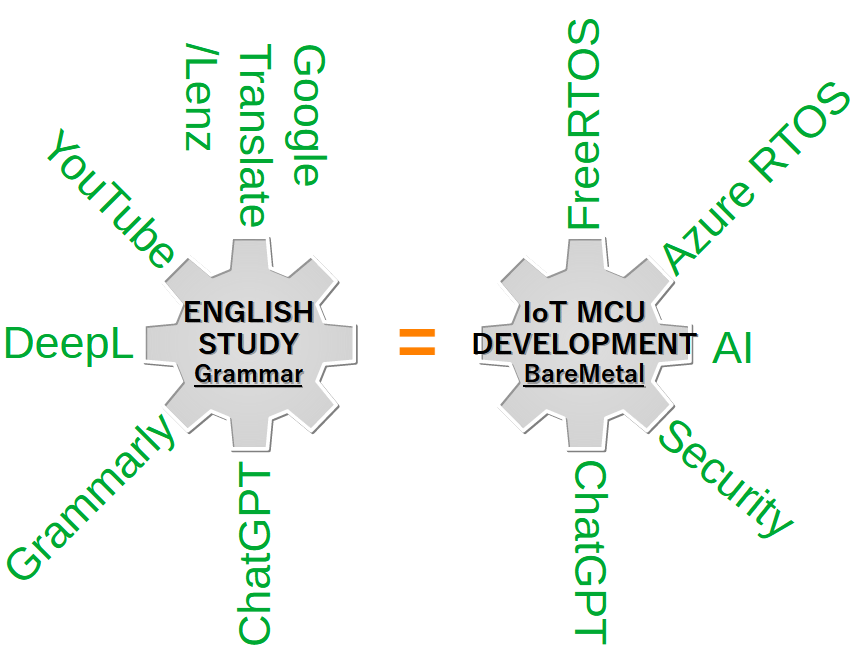
新しくMCU開発を始める方も多い時節です。新人や新担当者が、効率的にMCUを学ぶ方法を示します。今週は、MCUハードウェア編です(MCUソフトウェア編が、前投稿)。
Summary:新しいMCUハードウェアの学び方
ベンダMCU評価ボードのアートワーク、実装部品を学ぶ
知りたい用語は、ChatGPTから回答を得る
MCUとセンサなどの周辺回路動作電圧差に注意
ベンダMCU評価ボードの教師活用 MCUハードウェア習得のコツは、ベンダ提供MCU評価ボードの教師活用です。
開発に適す評価ボードの回路図やアートワーク、BOM(Bill of Materials:実装部品表)など全ての情報を活用します。
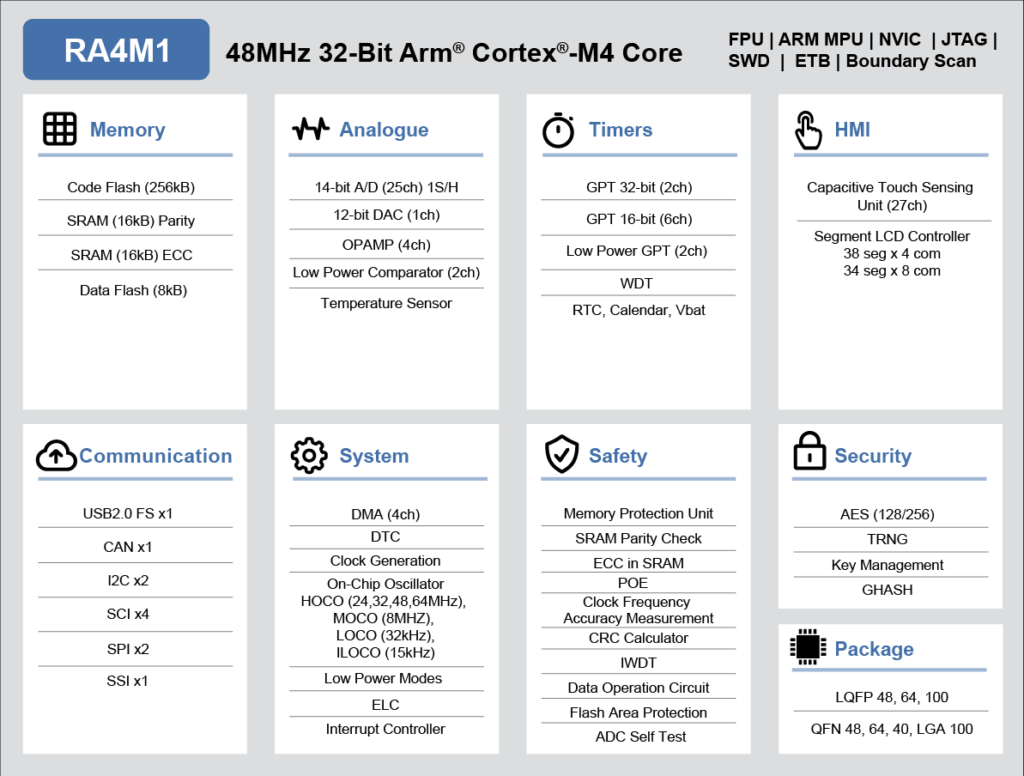
最近のMCUは、数100MHzクラスの高速動作です。安定した高速動作を支えるのは、MCU周りの電源配線アートワーク、実装部品、評価ボード電源回路です。
自社MCUボード開発時は、MCU周りアートワーク、評価ボードと同じ部品、これらを自社MCUボードへ適用するのが基本です。評価ボードのアートワークや実装部品の意味を考えることで、実践的なMCUハードウェアが学べます。
注)新しい点は、ChatGPT利用の知識習得、評価ボード教師活用の2点です。
MCU評価ボード教師活用
理屈は知っていても、その理屈を実際の製品基板へ「上手く反映させる」のが難しい。これは、ハードウェア開発にありがちです。
例えば、高速動作には、配線を太く短くしノイズ対策すべきだが、部品の大きさや故障交換も考慮すると、この配置にせざるを得ない等々です。
つまり、ハードウェア開発者が、様々な制約条件を優先度で総合設計した結果が、製品に現れます。
この総合設計結果は、ベンダMCU評価ボードでも同じです。ユーザが、MCUを評価するためのボードですから、ユーザがどのようにMCUを使っても正常動作することに重点を置いた設計結果です。
言い換えると、MCUを最高速で動かした次の瞬間に低電力動作、更に割込み発生で瞬時に最高速へ戻るなど、究極のMCU動作にも余裕で耐えられる配線アートワークや電源部品を選定し、評価ボードへ実装済みです。
これらノウハウを詰め込み製品化したベンダMCU評価ボードのハードウェアを、手本や教師(≒ベンチマーク)として利用しない手はありません。
但し、設計ノウハウが文章化されることは、殆どありません。従って、担当者は、評価ボードから設計ノウハウの中身、背景を考え、学ぶことが必要になります。
つまり、製品設計を見抜く洞察力が、ハードウェアスキル向上に必要です。
ハードウェア製品の中身、背景を見抜く洞察力 経験者アドバイスを、MCUソフトウェア編 では期待しました。しかし、MCUハードウェアは、先ずは物言わぬ評価ボードを教師:ベンチマークとする学びをお勧めします。理由は、MCUハードウェアや実装部品の世代交代の速さです。
ベンダMCU評価ボードは、最新MCUは勿論、MCU性能を活かす実績ある最新部品を使っています。MCUハードウェアは、ベンチマークから直接学ぶ方が、効率的です。
経験者アドバイスを活用するのは、優先度による総合設計時です。ただ、総合設計ノウハウは、状況に応じて刻々と変わり、かつ、文章化し難い、つまり、直感のようなものであることも忘れないでください。たとえ経験者でも、第3者への直感伝授は、難しい事柄です。
ポイントは、以下です。
ベンダMCU評価ボードをベンチマークにすること
効率的に知識を得ること
MCUハードウェア世代交代に注意すること
これらポイントの実現手段が、前章Summaryに示したChatGPT利用と評価ボード教師活用です。
以下、Summary 1.2.3の詳細を説明します。
1. MCU評価ボードアートワーク、実装部品の意味を学ぶ
新しいMCUハードウェアの学び方その1 低速デバイス同士は、接続さえ間違わなければ機能します。しかし、数100MHzクラスやRF(無線周波数)ハードウェアのデバイスは、違います。
最近のMCUは、この数100MHzクラスを優に超える動作周波数です。IoT MCUなら無線デバイスも実装します。これら高速デバイスの安定動作や、周囲にノイズをまき散らさない工夫として、デバイス間の配線アートワークと電源供給が重要です。
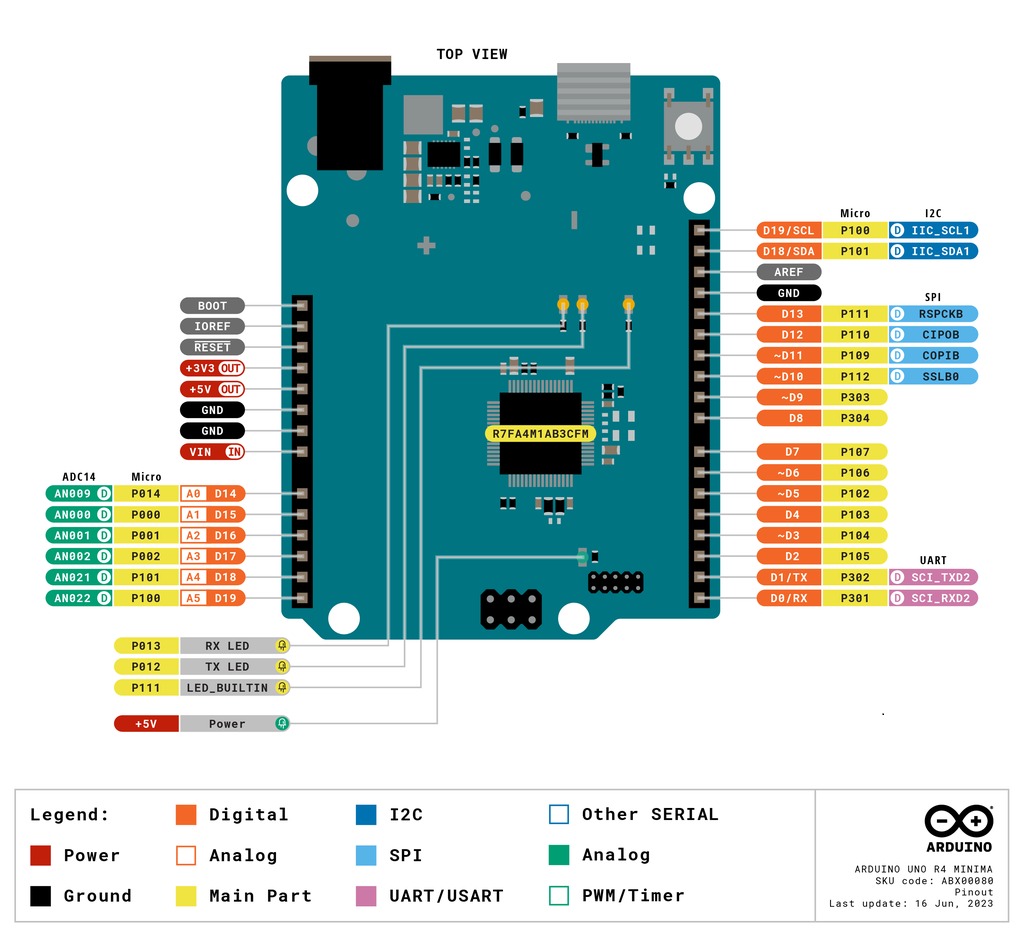
回路図は、デバイス間の接続(ネットリスト)を作成します。同じ接続でも、実際にデバイスを基板上へ配置、配線するPCBアートワークが、高速デバイス製品成功の決め手です。
ベンダMCU評価ボードは、回路図、アートワーク情報、BOMも提供します。但し、提供だけで肝心の解説などはありません。従って、これらから決め手を自分で抜き取り、学ぶことが必要です。
例えば、アートワークを眺めていると、なぜMCUのこの配線だけ太く短いのか、BOMからは、なぜこの部品だけ高品質なのか、など疑問が沸いてくるハズです。
疑問をそのままにせず、自分なりに意味を考え、答えを持った後に、ChatGPTを利用すれば、より深い洞察ができます。
2. ChatGPTで回答を得る
新しいMCUハードウェアの学び方その2 ハードウェア進化は、早く劇的です。その例が、PC CPUソケットです。CPUソケットは、同一でのハードウェア進化を誰もが望みますが、時にはソケットや周辺部品を全面変更してまで進化に対応します。
新製品MCUや、これを活かす部品の情報は、ネット収集が効率的です。AIは、これら最新情報を常に収集、分析しています。ChatGPTは、質問の最新回答を得るのに適しています。
ChatGPT回答には、間違いの可能性もあります(関連投稿 )。それでも、AIによる最新で判り易い文章回答は、期待できます。
ChatGPT利用により、担当者は、いつでも気軽に質問ができます。この気軽さと効率的回答(最新知識)を得るメリットの方が、間違いの可能性よりもまさると思います。
3. MCUと周辺回路の電圧差
新しいMCUハードウェアの学び方その3 MCUは、今後さらに高速化します。製造プロセス微細化と、高性能、低消費電力、低価格MCUをユーザが求めるからです。
一方、MCUへ接続するセンサは、デジタルだけでなく、アナログも重要な技術です。AI搭載など、センサ高度化も話題の昨今ですが、製造プロセスや動作電圧もMCUほど進化し難い側面があります。
高速追求のMCUと、高機能追求のセンサや周辺回路の差は、動作電圧差として現れる可能性があります。
5Vトレラント 端子のMCU、MCU-センサ間インタフェースデバイス、複数電圧の電源回路など、MCUとセンサなどの周辺回路接続には、注意が必要です。
Afterword:設計クオリティと洞察力向上
MCUハードウェア開発者は、COVID-19による半導体不足を経験しました。
ハードウェア開発者としては、機能別モジュール化、制御系MCU評価ボードのそのまま流用 などの組合せを工夫する対策に加え、シミュレーションやテストプログラム(TP)利用なども対策になります。
どの対策も、ハードウェア設計クオリティ向上が目的です。
ハードウェア設計ノウハウは、直感の部分もあります。直感が正しいか否かを客観判断し、勘を磨くには、シミュレーションやTPが役に立ちます。実際の測定器を使わずに、シミュレーションやTPを使って仮想的に試すと、試行錯誤も容易です。
MCU統合開発環境(IDE)は、これらシミュレーションツールやTP(サンプルコード)の宝庫です。MCUハードウェア開発者もIDEを活用し、直感を磨いてください。
更に、ハードウェア洞察力を磨くには、アートワーク設計もお勧めします。
MCU周り、ADC周りだけでも良いので、実際にPCBアートワークを行うと、回路図では見えない高速デバイス製品化ポイントが判ります。最近のMCU/ADC/無線デバイスデータシートは、これらアートワークについて記載されたものも多いので参考になります。