販売中のマイコンテンプレート 説明資料は、テンプレートについて重点的に説明しています。しかし、ご購入者様から頂く質問には、テンプレート動作環境、つまりマイコンIDEに関するものも多くあります。
Windows 10発売を機に、皆さんは今新しいOSの機能や利用方法を習得中だと思います。マイコンIDEと、このWindows 10を関連付け解説を試みます。
マイコンIDEは、OSと考えるべし Windows 10、旧Windows 7や8と比べると、新ハードウエアやネットワーク、セキュリティ対応に機能満載です。多くの設定項目がありますが、最初はデフォルト設定で動かすのが良いでしょう。慣れてくれば、設定をいろいろに変えて、自分好みにカスタマイズもできます。
マイコンIDEも同じです。IDEは、多くのマイコン機種、使用言語、デバッグ方法に対応できるよう多くの選択肢:プロパティを持ちます。ユーザマニュアルにも、多くのページを使ってプロパティの説明があります。しかし、IDEを使う時に、これら多くのプロパティを、全部知るのは無理ですし不要 です。
Windowsと同じく最初はデフォルトで使用し、徐々にカスタマイズするのがIDEやOSなどの環境ソフトの使い方 です。
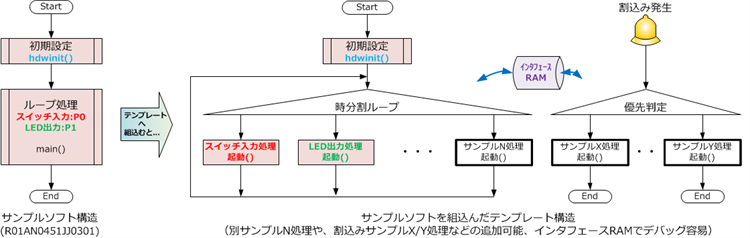
初心者にとって、デフォルト設定でIDEが使えればありがたいのですが、多くのIDEは、中級~上級者へも対応する、いわば「初心者と中級者以上の二兎を追う方式」のため、多少のカスタム設定が必須です。標準評価ボードを使ったマイコン開発時 です。弊社テンプレートが、この評価ボードで動作確認しているのもこのためです。
マイコンIDEのプロパティ設定が多いのは、しょうがない。 カスタムプロパティ設定の少ないIDE+標準評価ボードが、マイコン初心者には適す。
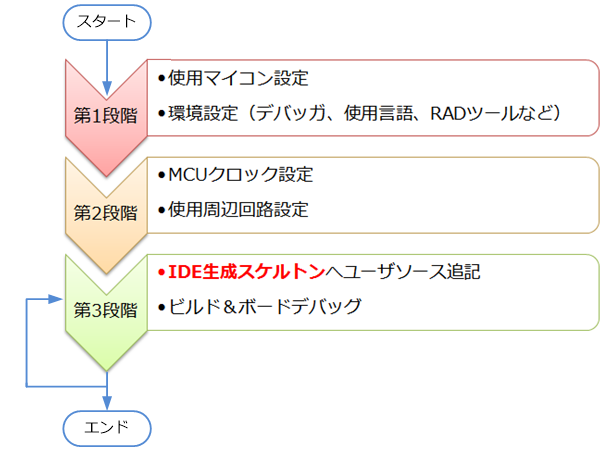
マイコンIDEの使い方ポイント 使用するマイコン、開発言語(C/C++ または アセンブラなど)、IDE(コンパイラやデバッガなどの開発環境)は選定済みとします。この時のIDE設定手順が下記です。3段階から構成されます。
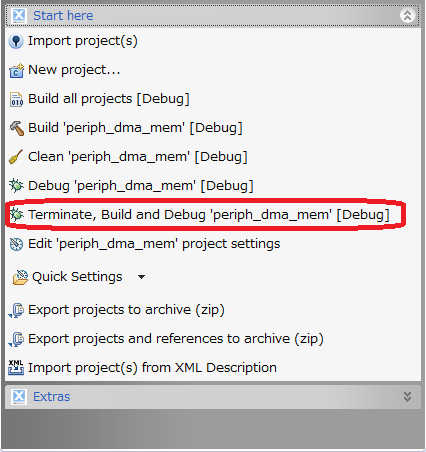
マイコンIDE設定手順 IDEへ使用マイコンとデバッガなどの環境ツール設定が、最初の段階です。ここでは、Rapid Application Development: RADツールを使用するか否かなども選択肢になります。MCU:マイコン本体クロック設定と周辺回路の設定が、次の第2段階です。最後が、IDEが出力したスケルトンソースへ、ユーザソースを追加し、ビルド&ボードデバッグを繰り返し行い、アプリケーションを完成させます。
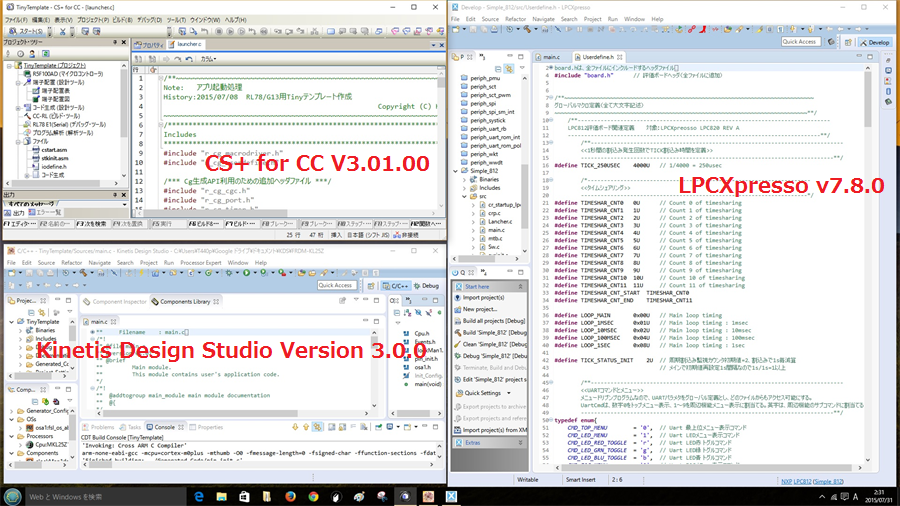
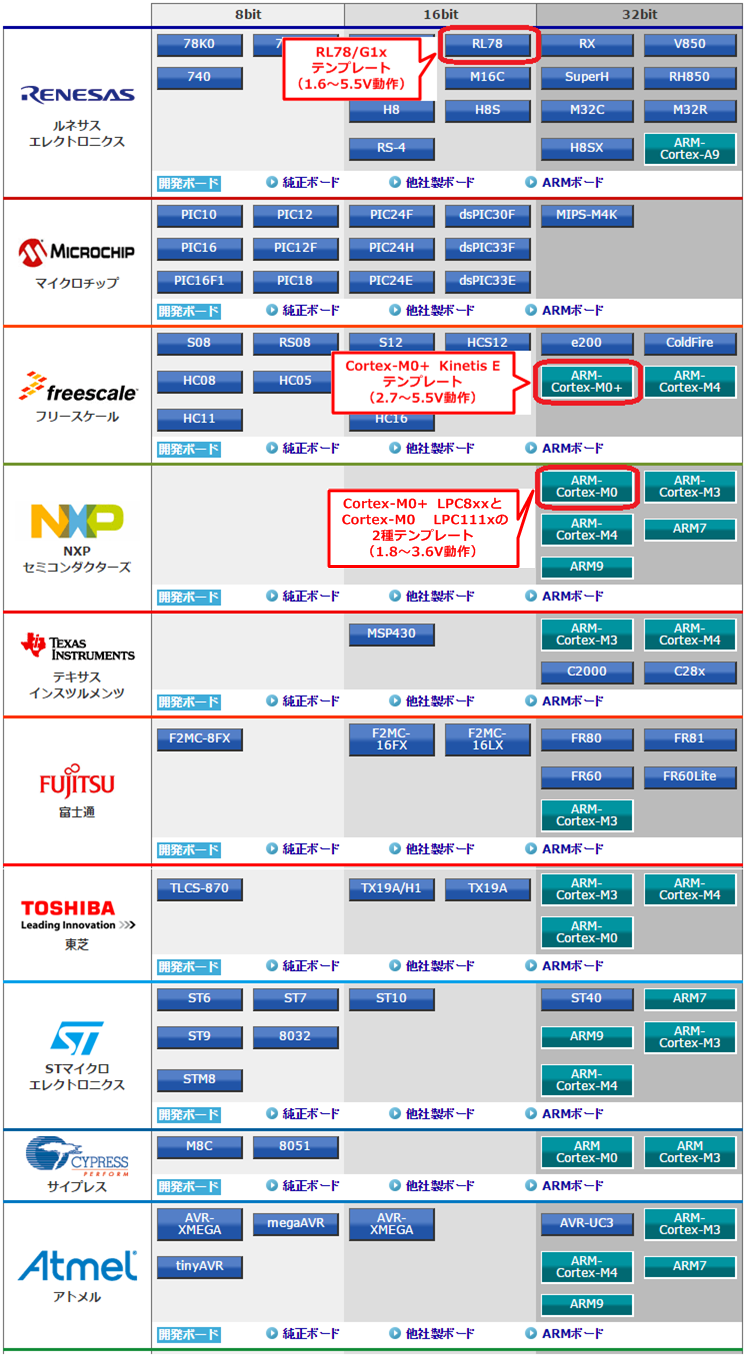
ポイント1:IDE生成スケルトン理解 直ぐにユーザソースを追記したい気持ちは解ります。しかし、使用するRADツールに応じてIDEが生成するスケルトンが異なる ことがよくあります。例えば、FreescaleのKinetis Design Studioの場合、RADツールにProcessor Expertを選ぶ場合と、Kinetis Software Development Kitを選ぶ場合とでは、スケルトンが異なります。ルネサスのCS+でも、コード生成の有無でスケルトンは全く異なります。
先ず、IDEが生成する「スケルトン動作を把握することが最重要」 です。このために、RAD選択肢を変えることも必要でしょう。殆どのIDEの場合、第2段階のMCUクロックは、デフォルトで安全動作周波数に設定済みです。従って、周辺回路なしでも生成されたスケルトンコードでボードデバッグができます。
スケルトン動作把握とは、「マイコン電源投入後、順番にどの処理を行い、main()を呼出しているか、次に、割込み処理の記述はどこで行っているかを知ること」 です。
main()呼出しまでの処理(スタートアップ処理)は、MCU動作クロックを変更する場合などを除けば、大体把握できればOKです。また、マイコン機種による違いも少ないです。
一方、割込み処理記述は、使用マイコンやIDEにより様々です。経験的に、IDEと標準評価ボードの組合せで用いる記述方法が、解りやすさや柔軟性に優れます。素直に、この方法でユーザ処理を追加することをお勧めします。
IDE生成スケルトンは、使用RADツールにより異なる。 生成スケルトンの動作を把握することが最重要。
ポイント2:デバッガ接続 最初は、MCUクロックはデフォルト設定、周辺回路なし、スケルトンコードのみでビルドします。このビルドは、IDE生成分のみですので100%成功するハズです。
問題は、デバッガ接続 です。
IDEがサポートするデバッガは、通常4~6種類もあります。デバッガに応じてさらに詳細設定が必要ですので大変です。ここは、ユーザマニュアルの「対応デバッガ部分のみ」 を注意深く読んで、設定する必要があります。ユーザマニュアルが分厚いのは、このように対応種類が多いためです。使用するデバッガのみに絞って読めば、恐れるに足りません。
IDEとデバッガを接続後、ビルド出力をボードへダウンロードし、デバッガで動作確認します。何もユーザ処理を追加していない時の動作、例えばスタートアップ処理後のRAMクリア状態などが確認できます。
ユーザ処理は追加していませんが、これでIDEの処理全体を一通り試すことができます。
IDEとデバッガ接続は、ユーザマニュアルの対応部分を拾い読み。 最初のビルドは、スケルトンコードのみでデバッガ接続しIDE全体処理を体験。
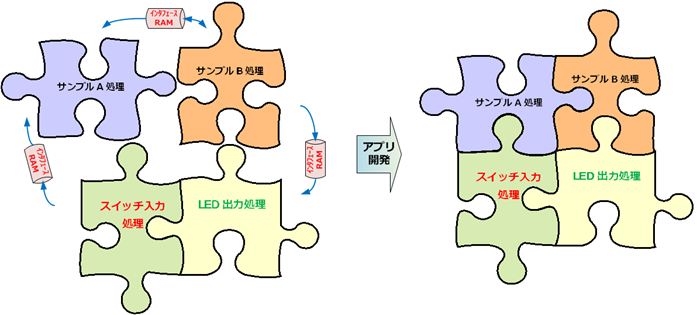
ポイント3:サンプルソフトAPI利用例を活用 スケルトンは、骨組みです。この骨組みに、ユーザ処理を追記すれば、アプリケーションが完成します。
骨組みには、IDEが使用周辺回路に応じてライブラリを生成します。このライブラリへのインタフェースがAPI です。IDEの役割は、APIの中身を作ること です。
ユーザソースは、このAPIの使用順序を記述するのみ と考えても良いです。少し前までは、このライブラリもユーザが開発していました。しかし最近は、ライブラリはベンダが提供します。ベンダ提供ライブラリを使えば、ユーザソースは、API使用順序のみですので、移植性やメインテナンスも楽です。
APIの使用法は、これも分厚いAPIレファンスマニュアルに記述されています。しかし、真面目にこれを読む前にサンプルソフトを参照 します。典型的な周辺回路APIの使い方、これがサンプルソフトです。サンプルに出てくるAPIのみをレファレンスマニュアルでチェックすれば十分です。サンプルソフトの選び方は、コチラ を参照ください。
IDEは、スケルトンと、使用周辺回路に応じたAPIを生成。 サンプルソフトを参照し、典型的なAPIの使い方を学ぶ。
まとめ 多くのプロパティがあり、付属マニュアルも厚いので取っ付きにくいマイコンIDEですが、ここで示した方法を用いれば、早く効果的にIDEを習得できます。
具体的な話が少ないので、皆様のお叱りを受けそうですが、少しでもご参考になれば幸いです。
* * *
Windowsには、様々なTipsがあります。各マイコンIDEのTipsも少なからずありますが、ここでは個々のIDEによる違いは無視して説明しました。実は、IDEで差が生じるのはRADです。RADに対しては、初心者の方は、少し力を入れてマニュアルを読む必要があるかもしれません。
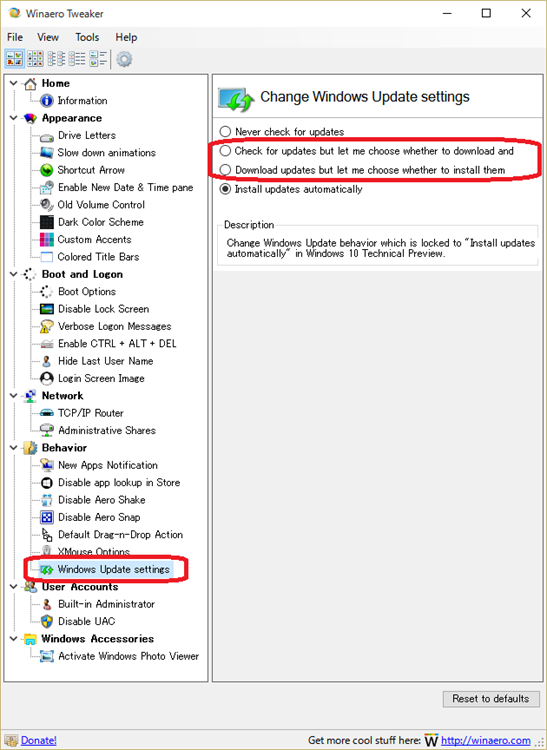
Windows 10 Home UpdateコントールTips マイコンIDEで具体例が無かった代わりのTipsです。フリーソフト: Winaero Tweaker が役立つかもしれません。Technical Preview対応ですが、製品版にも使えそうです。
Windows 10 Home Update Control