弊社マイコンテンプレートで扱っております主要マイコンベンダ、NXP、ルネサス、STマイクロエレクトロニクス、Cypress各社の2018最新ニュースとRTOS関連ニュースの中から、ブログ対象MCU関連の情報をピックアップしました。
NXP
MCUXpresso IDEの新バージョン10.1.1_606がリリースされました。また、LPC8xx向けのLPCOpenライブラリv3.02もリリースされましたが、リリースノートを見てもv3.01のバグ解消は未処理のようです。
そのためか、MCUXpresso IDE v10.1.1付属LPCOpenライブラリもv2.19のままで、v3.02添付はありません。近いうちにv3.02の動作を調査する予定です。
ルネサス
インターシル社と完全統合した新生ルネサス誕生(2018年1月1日)。アナログ関連で高いスキルを持つ旧インターシル技術がRL78マイコンへも導入されそうな気配があります。Cortex-M0/M0+コアとの競争に生き残るには、汎用RL78マイコンのアナログ強化、センサ内蔵が方策なのでしょう。
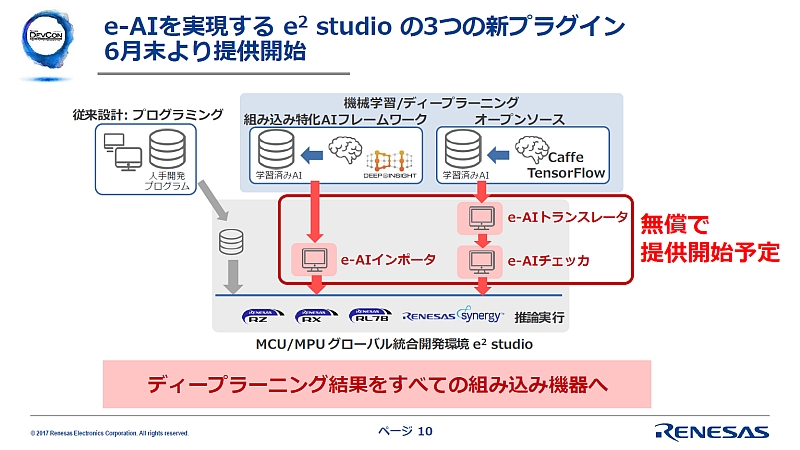
但し、開発環境CS+の先行きには不安要素もあります。6月末提供予定のe2 studioのAI利用無償プラグインはRL78もカバーされますが、果たしてCS+でも同機能がサポートされるのかが気掛かりです。
STマイクロエレクトロニクス
既にEWARM、MDK-ARM、TrueSTUDIO、SW4STM32の4種IDEをSTM32マイコン向けに提供中のSTMが、TrueSTUDIOの開発元スウェーデンのAtollic社を買収しました。
現状のEclipseベースTrueSTUDIO無償版もコードサイズ制限はなく、弊社使用中のSW4STM32無償版サイズ制限なしと機能的には同じです。このTrueSTUDIOとSW4STM32を比較し、なぜAtollicを買収したのかを探りたいと思います。
Cypress
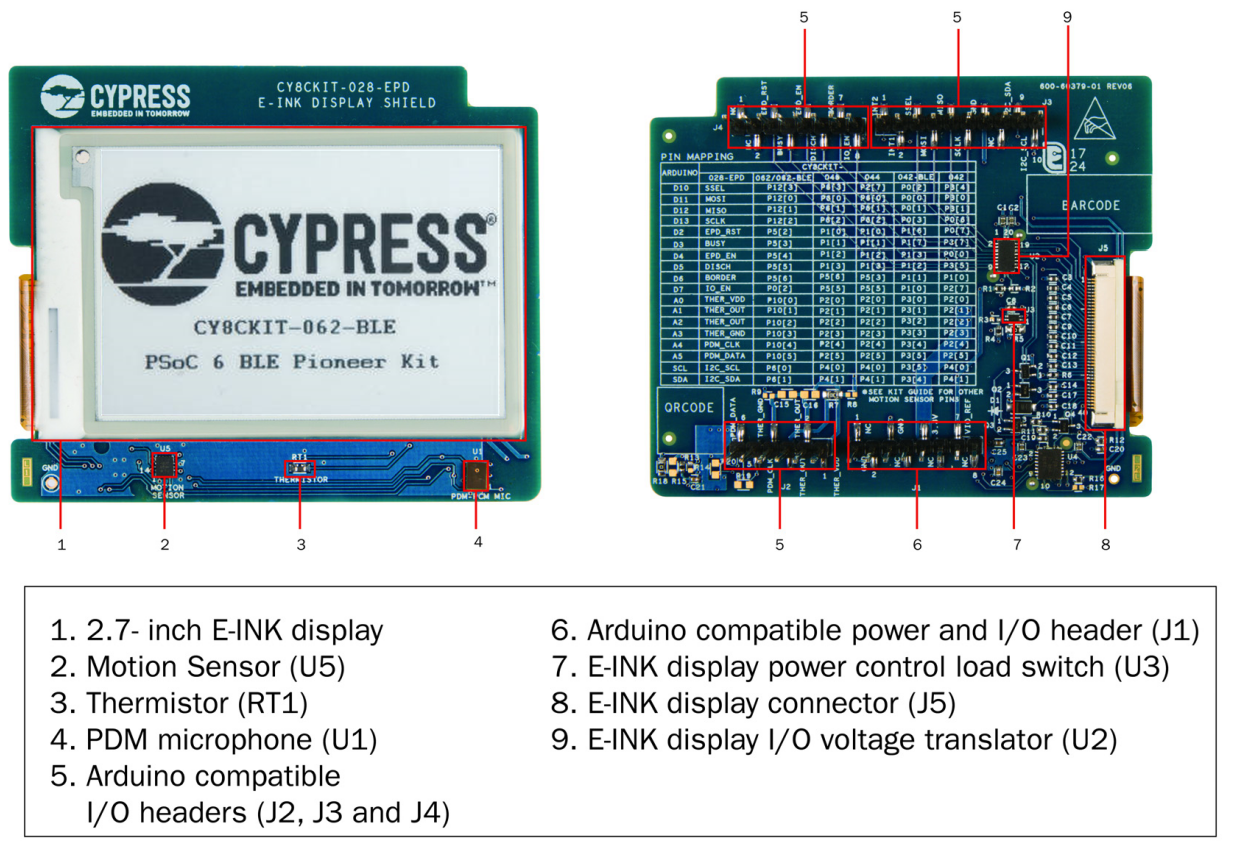
最新マイコン評価ボードで紹介しましたCY8CKIT-062-BLE PSoC 6 BLE Pioneer Kitが、サイプレスサイトからも購入できるようになりました。また、サンプルソフト(Code Examples)も豊富に提供されています。
E-ink液晶を使ったArduinoシールドは、汎用性が高そうなので興味を惹かれます。
RTOS
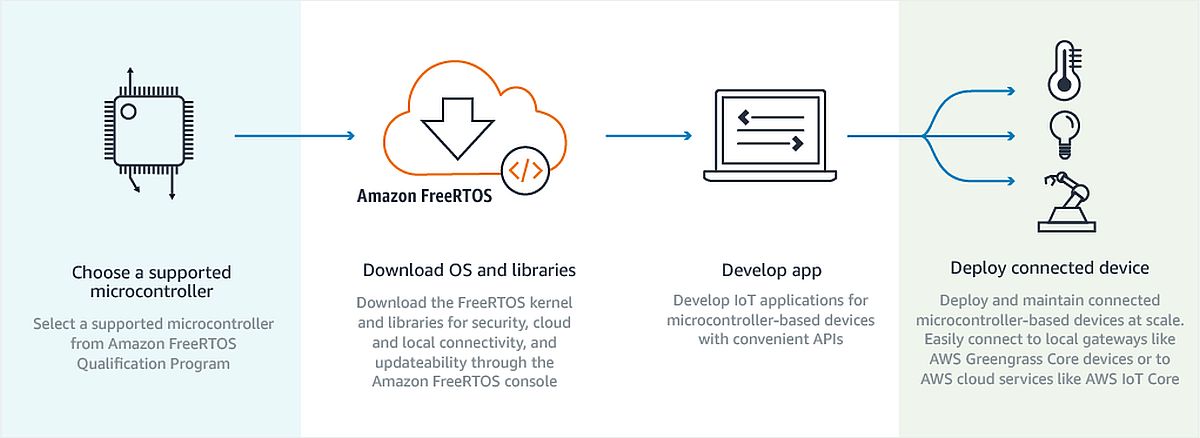
mbed OS 5の新しいバージョンMbed OS 5.7.2 がリリースされました。Amazon FreeRTOSなど、MCU用RTOSの普及も2018年のトレンドになりそうです。
まとめ
2017年の半導体ベンダランキング(速報値)が発表されました。NXPは第10位(前年9位)です。2016年MCUランキングは、NXP>ルネサス>STM>Cypressの順でした。NXPとルネサスがMCUシェアの1/3を占めるのは、今年も変わらないかもしれません。
例年に比べ2018年はMCU各社の動きが早いように感じます。EVや自動運転、コネクテッドカーがMCU開発の動きに拍車をかけているのは間違いと思います。
新たな動向としては、ソフトウエア開発環境の整備です。数億、数十億個とも言われるIoTマイコン時代では、現状のようにオーダーメイドでのソフト開発では時間が掛かりすぎます。より高速で効率的なソフトウエア開発ツールやライブラリ活用術が求められるような気がします。