現役STマイクロエレクトロニクスの「メーカエンジニアの立場」から記載された、ユーザ質問の多かった事項を中心にSTM32マイコンデータシートの見かたを解説する記事(連載1回目)を紹介します。
全3回の連載記事内容
予定されている第2回、第3回の解説内容が下記です。
第1回:凡例、絶対最大定格、一般動作条件、電源電圧立上り/立下り(← 今回の記事)
第2回:消費電流、低消費電力モードからの復帰時間、発振回路特性
第3回:フラッシュメモリ特性、ラッチアップ/EMS/EMI/ESD、汎用IO、リセット回路
今回の第1回を読むと、データシートの読み誤り易いポイントが説明されており、興味深いです。ハードウエアに興味がある、または、ハードも自分で設計するソフトウエア開発者は、読むことをお勧めします。
マイコンハード開発を数回経験すると、おおよその感触とデータシートの見る箇所が解ってきます。私も新人の頃は、網羅されたデータシートの、”どこの何を見れば良いかが判らず”困惑したものでした。
ハードウエアテンプレートは評価ボードがお勧め
私は、使用するマイコンの評価ボードを、ハードウエアのテンプレートとして使います。
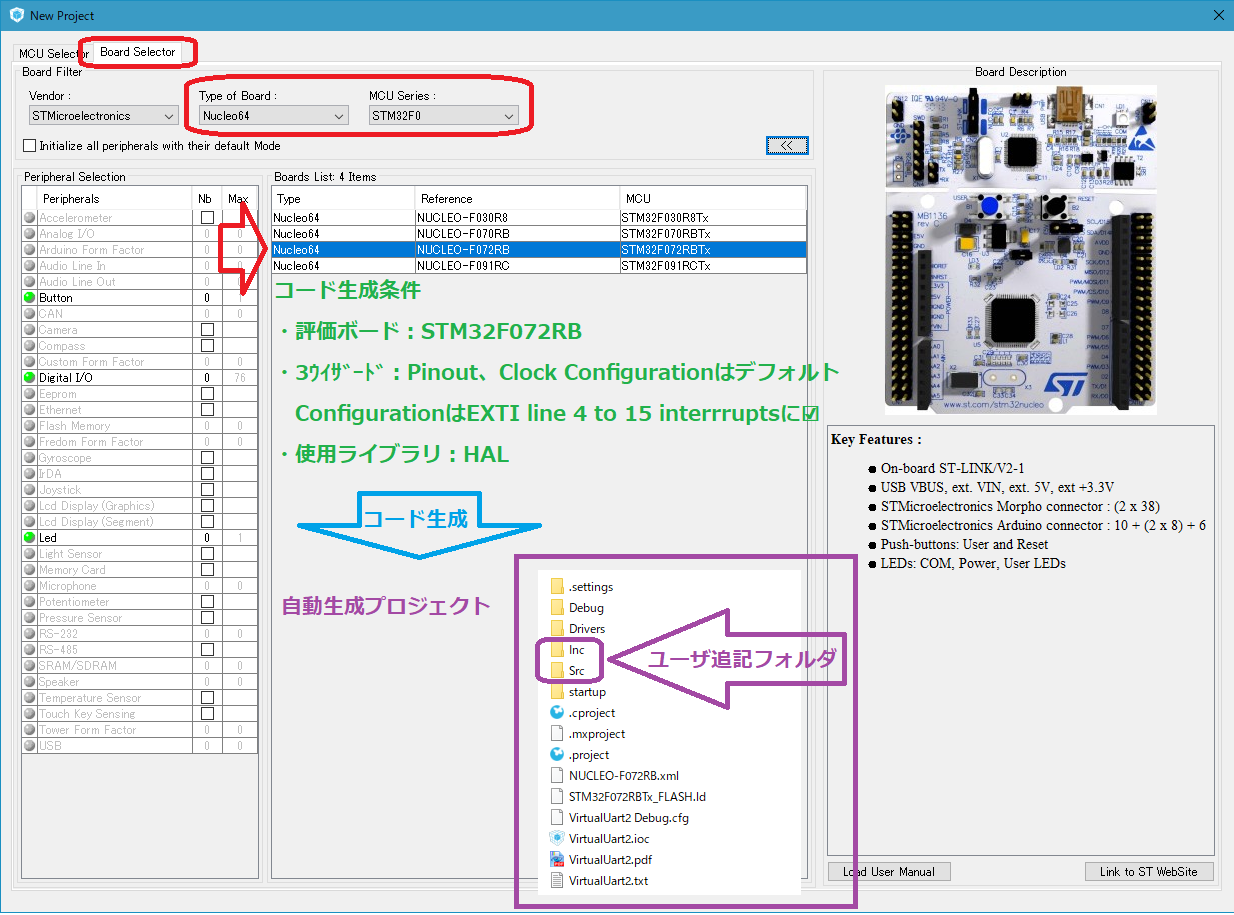
例えば、STM32F072RB(=NUCLEO STM32F072RB)は、配線パターン(=gerber files)や使用部品リスト(=BOM)もサイトに公開されています。
これらのデータは、「短納期を要求される開発者の立場」なら、網羅的記載のデータシートよりも、効率よく回路設計をする手助けとなります。
データシートを見ることは、間違いなく重要です。
しかし、具体的にハードウエア設計をする時は、評価ボードのような既に設計済みの「ブツ」を参考にしながら、なぜこの部分はこうなっているのか?などの疑問を持ってデータシートを見る方が、効率が良く、しかも、分厚いデータシートのポイントを理解するのにも役立ちます。
アナログとデジタル電源の1点接地や、パスコン実装位置などは、文字で注意書きをいくらされても解り難くいものです。この点、実物は、文字に勝ります。
ソフトウエアテンプレートはマイコンテンプレートがお勧め
ソフトウエア開発は、マイコンテンプレートの宣伝をするな!と思われた、勘のいい読者の方は、コチラのサイトを参照してください。
サンプルソフトは、”メーカ立場”での提供ブツですが、”開発者の立場”からの実物として、STM32ファミリ、サイプレスPSoC、NXPのLPC8xx/LPC111x/Kinetis、ルネサスRL78/G1xの各種マイコンテンプレートを、ソフトウエア開発者様向けに提供中です。
連載第1回範囲のデータシートの見かたまとめ
第1回記事の範囲で、マイコンハード開発ノウハウをまとめると、以下になります。
- マイコン外部接続ハード駆動能力は、I2C、USART、数点のLED直接駆動可能端子を除いては極小で基本的には直接駆動はしない。
- 外部接続ハードの駆動と接続方法は、Baseboard(mbed – Xpresso Baseboard)や、各種Arduinoシールドを参考にする。
- マイコン電源は、評価ボードのパターン、実装部品も含めてまねる。
- 開発製品版の未使用(空き)端子処理は悩ましいが、ソフトはデフォルト、ハードはソルダーブリッジ経由で接地。
私は、今後の連載を読んで、未使用(空き)端子処理の見識などを深めたいと思っています。