HappyTechサイトを年内完成目標に、レスポンシブ対応:Responsive Web Designへ改良します。
数年前にサイトを開発した時は、1ページ表示が流行っていたので、これに倣って(ならって)開発しました。しかし、スマホやタブレットなどのモバイルデバイスが増え状況が変わりました。
サイト内容のコンテンツ追加・削除もしにくい構成でしたので、流行のレスポンシブサイトに変更します。
レスポンシブテンプレートを探す
手っ取り早くレスポンシブサイトを開発する方法は、ネットに溢れるレスポンシブテンプレートを利用することです。
私は、HTML5 UPというサイトのテンプレートを利用しました。テンプレート説明資料はありませんので、開発には、多少のHTML、CSSの解読技術とベース知識が必要です。
レスポンシブテンプレートメリット
記載内容はそのままに、ユーザが使う画面大小に合わせて自動的に表示レイアウトを変えるのがレスポンシブサイトです。ご覧のブログはWordPressを使っていますので、利用テーマをレスポンシブ版に変えればそれで出来上がりますが、サイトの場合は、自分でHTMLとCSSを使って作り直す必要があります。
基本部分が出来上がったHTML5 UPテンプレートに、修正を加え動作を確認しながら、短期にサイトを開発できるのがテンプレート利用のメリットです。
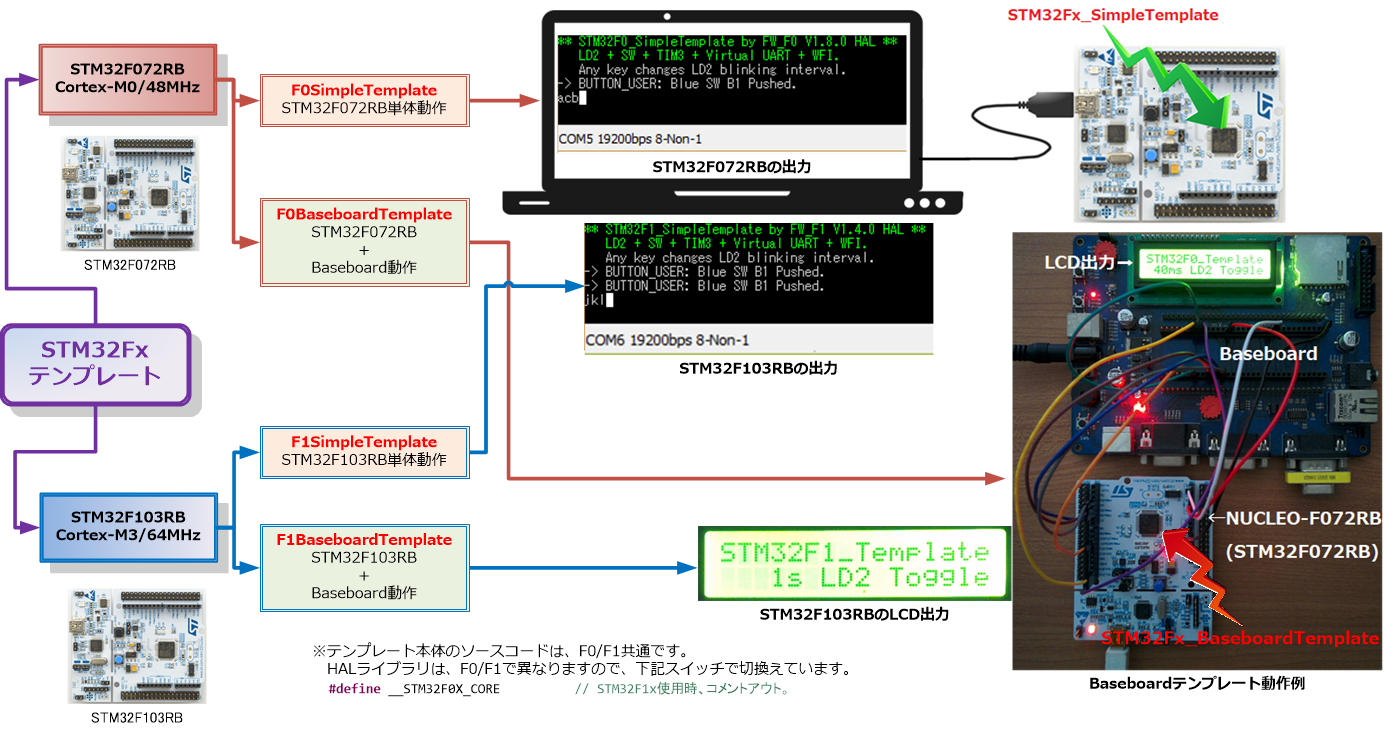
マイコンテンプレートメリット
このメリットは、弊社マイコンテンプレートでも全く同じです。
サイト開発と同様、マイコンも動き出すまでに手間がかかります。また、動き出した後も、修正や変更が生じます。テンプレートを使うと、この動き出しまでの時間を、殆ど0に短縮できます。
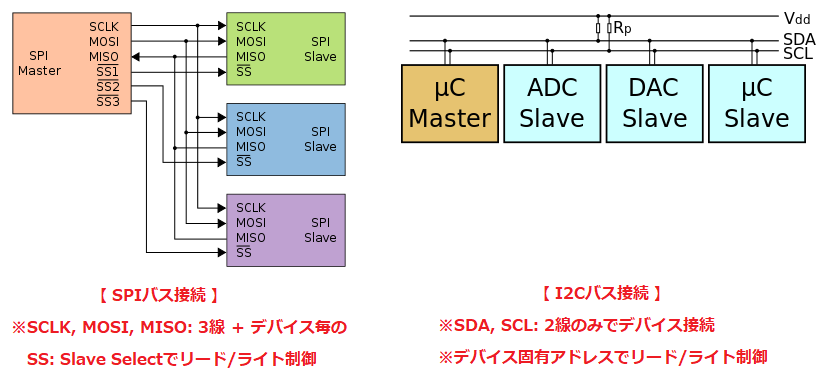
マイコンAD変換:ADCを例に説明します。
ADCは、サンプルソフトも多く使い方も良く知られています。しかし、実際にセンサを接続して動作させると、複数回ADCの平均を計測値とするか、あるいは、1回のADCを計測値とするかは、アプリにより異なります。
通常は、ノイズ対策として平均値を用いる場合が多いです。それでも、測定間隔や何回の計算で平均を求めるかについては、センサとマイコンを接続し、実際に動作させカット&トライ:試行錯誤で決めるのがBestです。
この試行錯誤に適したソース構成が初めから出来上がっていれば、試行も容易でスパゲッティーコード(!?)にもなりません。
つまり、立ち上げを早くし、実動作に近い環境でプログラミングでき、しかもスパゲッティー化を避けられるのがマイコンテンプレートのメリットです。
マイコンテンプレート説明資料
説明資料があると、テンプレート修正や変更が容易になります。テンプレート開発者の考え方、指針が解るからです。最近のソースコードは、数行に渡るほどの多くの英語コメントが付いていますが、コメント文だけでは、これら考え方、指針は表現できません。
説明資料が無い場合は、どこを修正・変更すれば良いがが不明で、この場所を探すのに余分な時間が必要になります。マイコンソースコードは、その傾向が特に強く修正や変更で直にスパゲッティーコードになります。
標準的な決まりが多くあるHTMLやCSSと異なり、マイコンソースは比較的自由に記述できるからです。その結果たとえ同じ職場でも、他人が開発したマイコンソースは解読が難しいのが現状です。標準的な知識レベルがバラバラなのも原因の1つでしょう。デサインレビューの結果が反映され難いのです。
そこで、マイコンテンプレートには説明資料を添付し、標準的と思う私の考え方や開発指針を多く記載しています。テンプレートソースコードにも豊富な(冗長な!?)日本語コメントが付いています。
勿論、これら考え方や指針は、あくまでご購入者様のテンプレート理解が目的で、押付けではありません。テンプレート版権は、ご購入者様個人に帰属しますので、ご自分の考え方を反映した改良も自由です。
ご購入者様のご質問にも丁寧にお答えします。
マイコンテンプレートは、初心者~中級者向けです。しかし、全ての方のレベルに合わせた説明は、不可能です。それぞれの方でご質問は、異なります。広いレベルの方に参考になると思ったご質問に関しては、テンプレート改版時、説明資料へ付け加えています。
以上の方針で、マイコンテンプレート説明資料やソースコードを作成しています。
マイコンテンプレートご購入者は、または購入検討中の方であっても、いつでも、どのようなご質問でも、大歓迎です。お気軽にinfo@happytech.jpまでお寄せください。