ARM Cortex-M0 LPC111xテンプレート発売開始
Cortex-M0搭載のLPC111xテンプレート(LPCOpenライブラリ版)を¥1000(税込)で販売します。テンプレート概要と仕様は下記です。
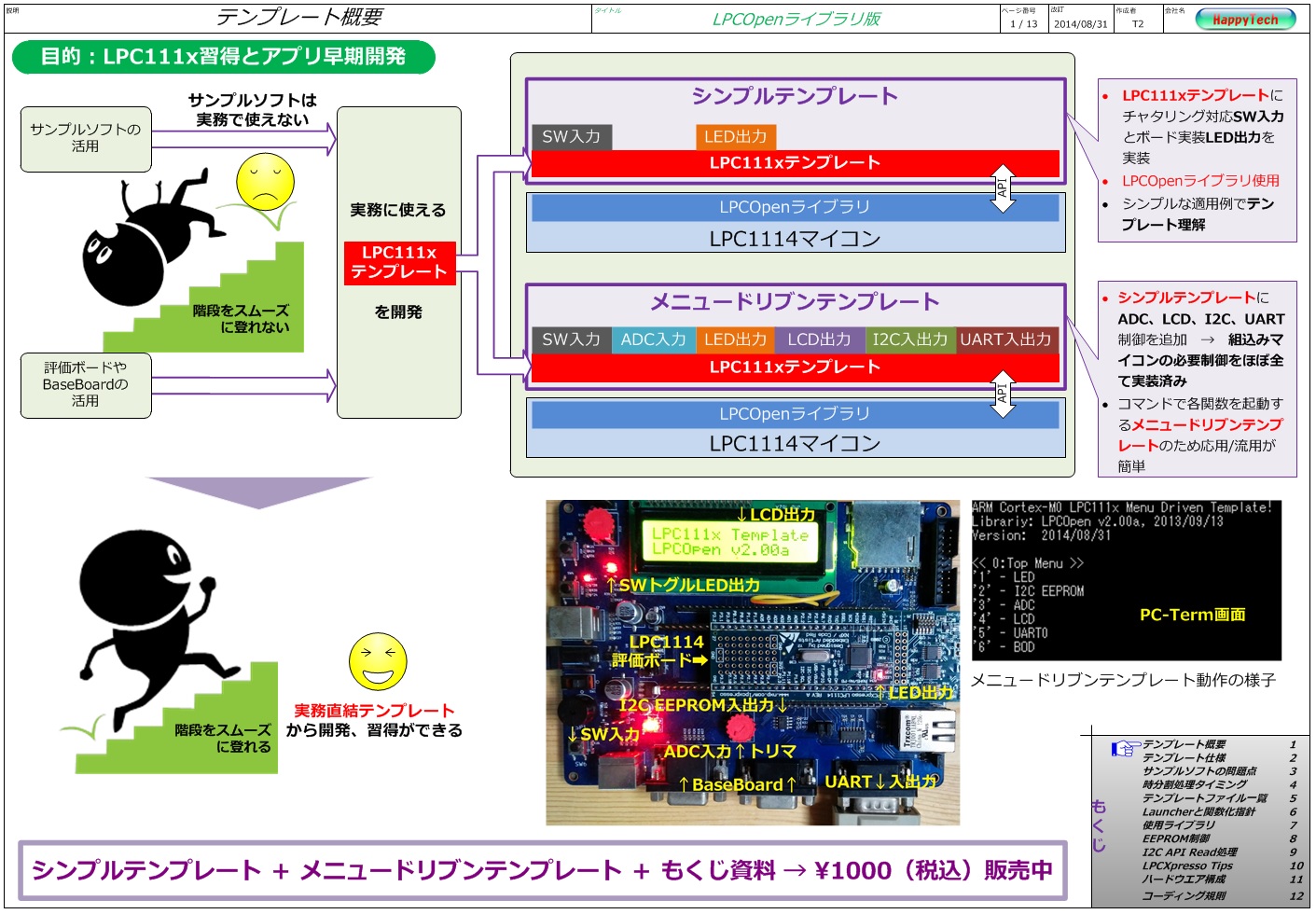
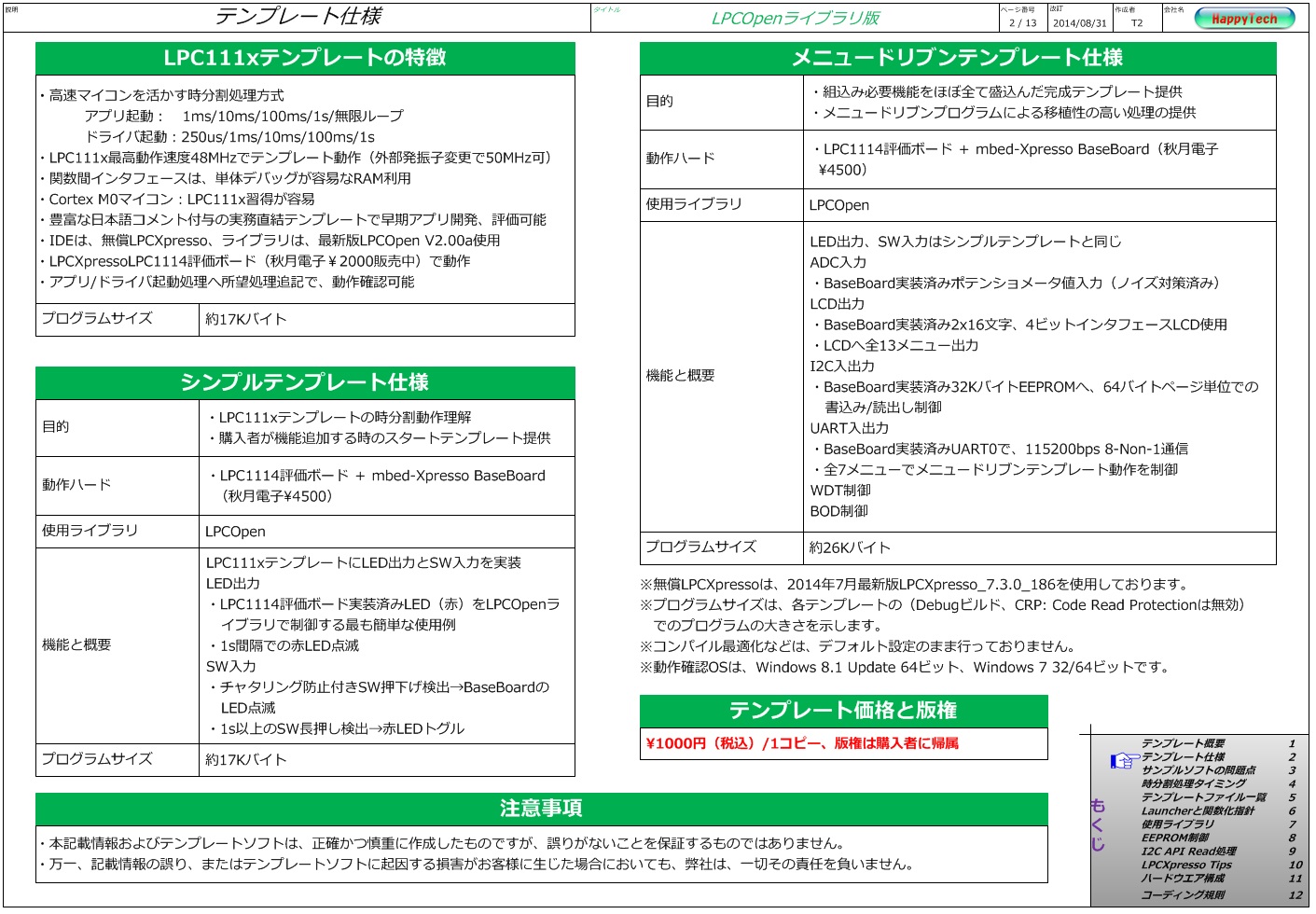
テンプレートは、LED出力とSW入力のみを組込んだ「シンプルテンプレート」と、組込み必要機能をほぼ全て盛込んだ「メニュードリブンテンプレート」の2つセットで、もくじ内容の説明資料添付で¥1000です。
購入ご希望の方は、メール(宛先:info@happytech.jp)にてお知らせください。銀行振込口座を返信いたしますので、税込代金¥1000円を振込でください。入金確認後、全説明ページとテンプレートプロジェクトをメールにてお送りします。後は、ご自由にテンプレートへ変更や修正を加えて頂いて、LPC111xx習得や、本来のアプリ開発に役立てて頂ければ幸いです。
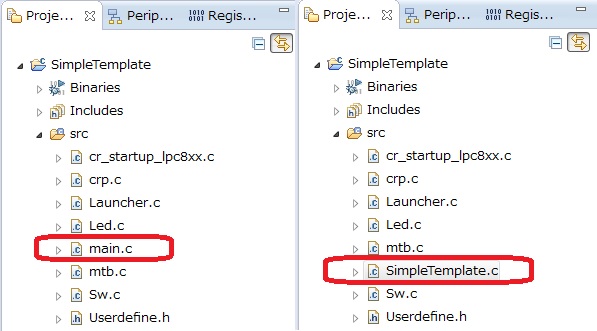
「シンプルテンプレート」は、LPCXpressoプロジェクトファイルで、LED出力とSW入力のみの機能をプログラム済みです。
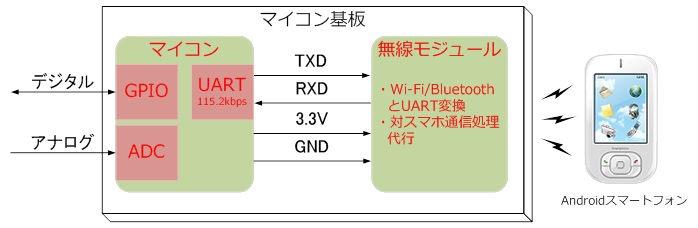
「メニュードリブンテンプレート」は、シンプルテンプレートにADC、I2C EEPROM、LCD、UARTなどの組込みマイコンに必要な機能をほぼ全て実装したテンプレートです。
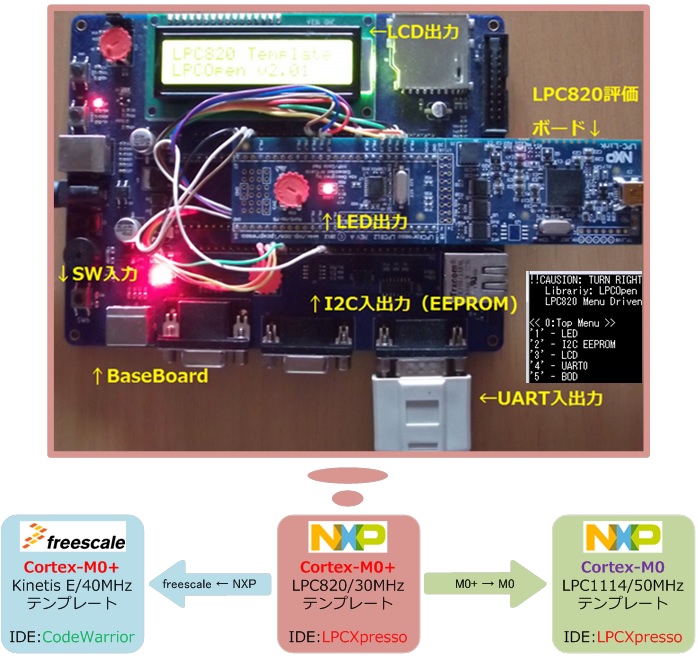
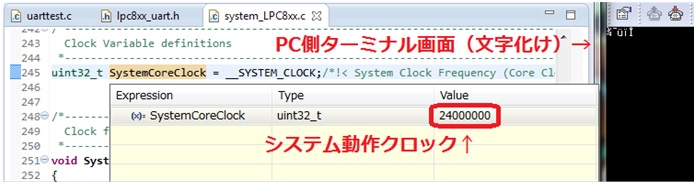
どちらのテンプレートもLPCXpressoLPC1114評価ボード(NXP製)とmbed-Xpresso BaseBoard(NGX Technologies製)を接続し、動作確認済みです。PC接続のメニュードリブン方式のため、関数単位で移植性が高いソフトです(もくじP1動作中の写真、P5ファイル一覧、P11ハードウエア構成などを参照)。
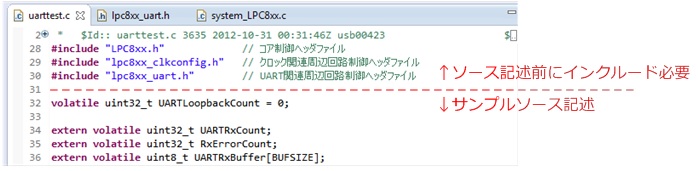
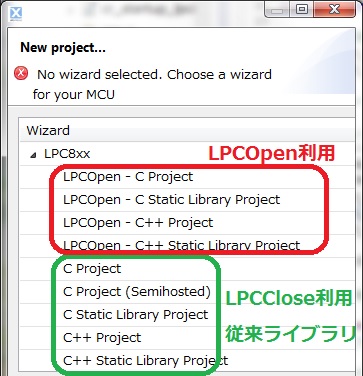
テンプレートは、NXP/ARM社提供の最新版LPCOpenライブラリ(v2.00a)を使っています。LPC111xは、上記の他に、従来版ライブラリもありますが、本テンプレートは使っていません(もくじP7に詳細記載)。
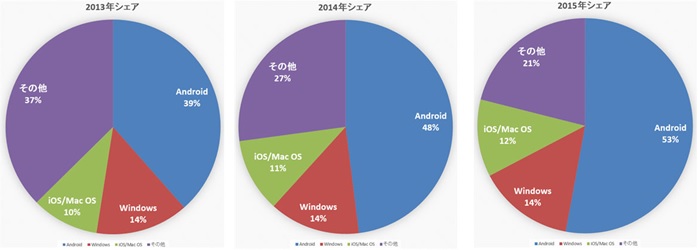
Cortex M0マイコンのLPC1114は、8/16ビットマイコンの置換えを狙った、従来品より高性能な割込み専用回路や低消費電力、低価格が売りの、世界定番ARM32ビットマイコンです。本テンプレートと確実に動作する市販評価ボードを使えば、LPC111x習得、早期アプリ開発や評価に最適な環境が得られます。
このテンプレート対象者は、初級~中級のソフト開発者です。上級者は、これに似たテンプレートを既に持っているからです。本来は、上級者がテクニックを含む自分のテンプレートを初級~中級者へ教え、教えられた側でさらに、テンプレートに修正を加えれば、技術継承も容易です。しかし、この継承は、習得済みの者にとっては、オーバーヘッドで、未習得の者にとっては、理解困難な面が多いものです。
販売テンプレートには、詳細なもくじ資料が付いていますので、だれにでもその内容が理解できます。また、テンプレートソースには、「判りにくい英語ではなく、日本語コメント」を豊富につけていますので可読性も高いと思います。
販売テンプレート一覧
このテンプレートを含めて、3種テンプレートが各1000円(税込)販売中で、本年末にさらに1種追加予定です。
| テンプレート名 | 対象マイコン(ベンダ) | 動作ハード | 備考 | ブログ検索タグ | 最新版リリース日 |
| LPC111xテンプレート(Cortex-M0) | LPC1114/1115 (NXP) | LPCXpressoLPC1114+BaseBoard | LPCOpenライブラリ使用 | LPC1114 | 2014/09/06 |
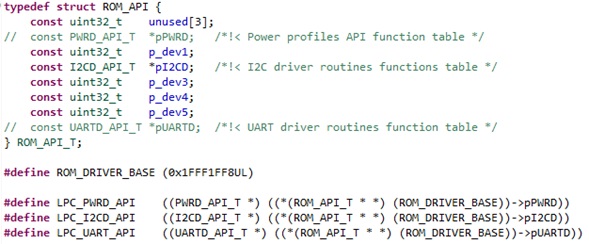
| LPC8xxテンプレート(Cortex-M0+) | LPC8xx (NXP) | LPCXpressoLPC820+BaseBoard | LPCOpenライブラリ+ROMライブラリ版 | LPC820 | 2014/05/18 |
| RL78/G1xテンプレートV2(RL78-S2/S3コア) | RL78/G13、G14 (Runesas) | ・BB-RL78G13-64(V2で追加) ・G13スタータキット ・G14スタータキット ・QB-R5F100LE-TB ・QB-R5F104LE-TB (+ブレッドボード) |
CubeSuite+のコード生成API利用。BB-RL78G13-64以外は、ブレッドボード上にマイコン周辺回路製作要。 | RL78/G13 RL78/G14 |
2014/10/10 |
| Kinetis Eテンプレート(Cortex-M0+) | Kinetis E/40MHz (freescale) | FRDM-KE02Z40M+BaseBoard | 【開発中】 | Kinetis E | 2014/12E予定 |
※ARM Cortex-M0/M0+マイコンの周辺回路は、BaseBoard実装済み回路を使います。
※RL78/G1xテンプレートは、周辺回路実装済みのBB-RL78G13-64(NGX Technologies製)で改版、改良を行う予定です。
本ブログは、これらのテンプレート情報や、開発Tipsなどを混載していますが、各記事にはブログ検索タグを付けています。このタグ、またはテンプレートでブログ右上のSearch:検索を実行して頂くと、タグ別表記になります。テンプレート毎の詳細記事や記載内容を個別にご覧頂く際に便利です。
テンプレートご購入者様の特典
既にテンプレートをご購入された顧客の皆様への特典として、新たに別テンプレート購入の際には、半額(500円、税込)にディスカウント致します。是非、新しいテンプレートを活用して、別マイコン開発へ挑戦して頂く際にご利用下さい。
また、ご購入頂いたテンプレートに関するご意見、ご希望なども、テンプレート改版や新テンプレート選定などへ反映させて頂きますので、既にお知らせした宛先までお寄せ下さい。