2017年末、IoT関連の2018年~2020年頃までの市場予測記事が多く発表されました。その中から4記事をピックアップして要約を示します。IoT開発者は、開発業務への対応だけでなく、急激に変わるかもしれない市場把握も必要です。
JEITA発表 2018対前年比2%プラス成長、2020東京オリンピックまで継続、家庭や個人向けが最大市場
JEITA:Japan Electronics and Information Technology Industries Association(ジェイタ)は、日本電子工業振興協会(JEIDA:ジェイダ)と日本電子機械工業会(EIAJ)が統合したITと電機産業の業界団体で、電機という枠を超えてトヨタ自動車やソフトバンクも参加しています。12月19日発表記事が、PC Watchに掲載されています。
- 2018年、電子情報産業の世界生産は、対前年比4%増(2兆8,366億ドル)、日本生産は前年比2%増(39兆2,353億円)の見通し。2020東京オリンピックまで成長継続。
- IoT市場は、2030年には世界404.4兆円、日本19.7兆円とそれぞれ2016年調査の約2倍に成長する見通し。特に、今年スマートスピーカーで話題となった家庭や個人向けが一番大きな市場になる。
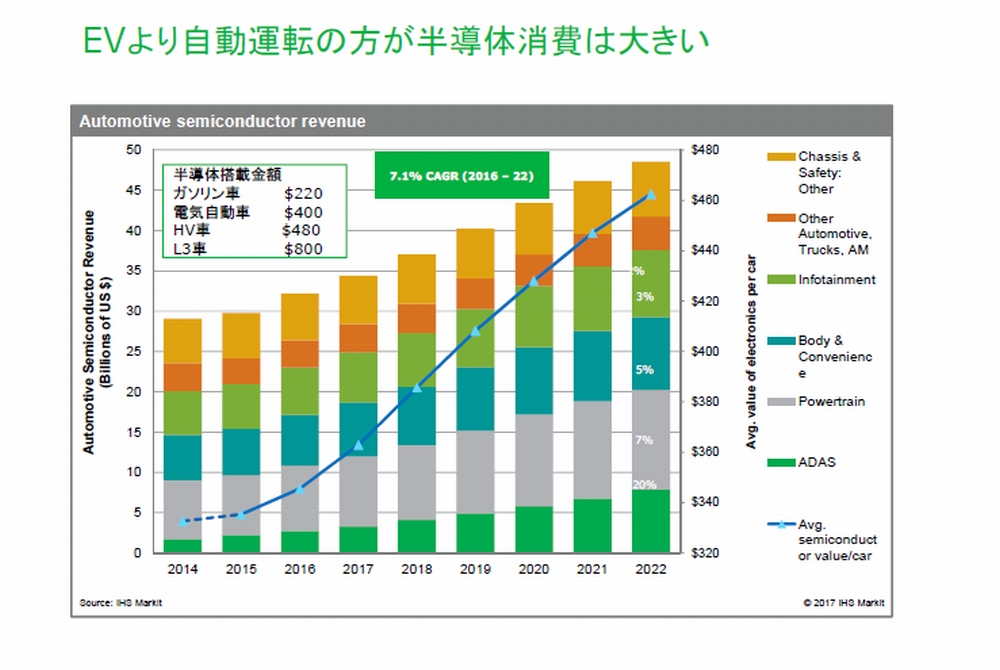
EVより自動運転が半導体消費は大きい
EE Times Japan12月14日掲載の新しい半導体の流れを作る、IoTと5Gによると、
- 自動車搭載の半導体需要は、EVが400米ドル、自動運転レベル3が800米ドルで、レベルが向上すると半導体搭載額はさらに高額となる。
手間を考えると、車載半導体をリサイクルすることは無いでしょう。車の平均寿命を10年としても、毎年膨大な数の車載半導体が消費されることになります。さらに、顧客(車ベンダ)のMCU高性能化やメモリ量増大の要求も強いので、数兆個とも言われるIoTの家庭や個人向けMCUも、この車載MCUの流れに沿ったものへ変わるかもしれません。
自動運転で半導体消費が増える理由は、車載センサーで見えない先方の情報をネットワーク経由で取得し、運転制御に利用するからです。車載MCUに高速で膨大な計算量、大容量メモリが必要になるのもうなずけます。
セキュリティ課題と対策
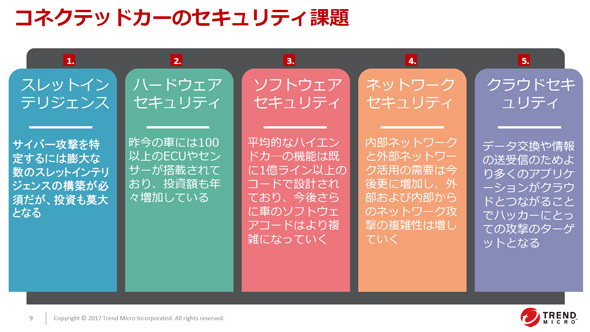
ネット接続で問題となるセキュリティ課題と対策については、12月19日Tech Factory掲載の【徹底解説】つながるクルマ「コネクテッドカー」のセキュリティ課題と対策に解説(要無料会員登録)されています。
- ウイルスバスターで有名なトレンドマクロは、家庭、自動車、工場の3領域に対してIoT戦略をとる。
- コネクテッドカー以外のIoTデバイスでも同じセキュリティ課題が下記。ソフトウエアセキュリティが最重要。
組込みソフトにも、ウイスル対策ソフトをインストールすることが必要になるのでしょうか? 私はRTOSに実装してくれることを望んでいます。
IoTエンジニア不足
日経IT Pro12月19日、日本のIT人材は「IoT初心者」、エンジニア2000人調査で判明では、
- IoTや人工知能を担う先端IT人材は、2020年には48000人不足
と分析しています。
職種が広範囲なので、実際の開発者が何人不足するかは私には不明ですが、2020東京オリンピック位までは、IoT開発者が忙しいのは確からしいです。
ここで挙げた予測の全てが確実だとは言い切れません。しかし、開発者は、ここ数年で起こるかもしれない家庭や個人向けIoT MCUの変化に対応しつつ、IoTサービス企画立案、最新技術に基づいた高速な開発技術が求められるようです。
数か月の開発期間が終わって気が付くと、浦島太郎になったということだけは避けなければなりません。