マイコンのアプリケーション開発方法として、マイコンテンプレート を使った方法を前後2回に分けて示します。
アプリケーション開発手順 動くアプリ完成までの手順を示します。
対象動作、「何を、どうするか」を明らかにする。この段階では、細かいことを気にする必要はありません。例えば、スイッチをスキャンする程度で十分です。 サンプルソフトを探す。メジャーなマイコンは、必ず多くのサンプルソフトをベンダがサイト公開しています。この中から対象動作のサンプルを探します。 サンプルソフトを読む。サンプルソフトは、「初期設定処理」、次に「ループ処理」の2構成で記載されるものが殆どです。たまに、メニュードリブン形式もありますが、これは、弊社メニュードリブンテンプレートと同様、処理抜出を容易にすることを目的にしたものです。 サンプルソフトの必要部分をテンプレートへ組込み、デバッグ。
以上で、アプリが完成します。
マイコンの場合、組込み後、チューニングが必要な場合もありますが、アプリ完成後の処理ですし、アプリにも依存しますので、先ずは、動くアプリ完成までの手順を示しました。
RAD: Rapid Application Developmentツールを使う場合は、2のサンプルソフトをサイトから探す代わりにRADツールを使ってサンプルソフトを生成すると考えれば良く、同じ手順となります。
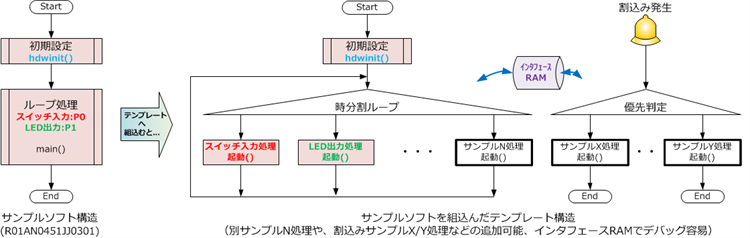
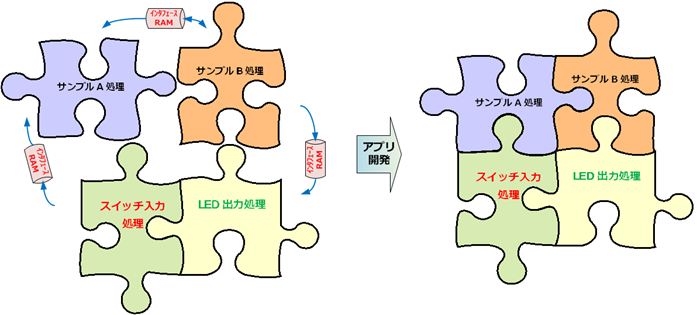
サンプルソフトベースの部品化 対象動作は、スイッチ入力処理、LED出力処理などできるだけ細かく分割し、部品化 することがポイントです。
サンプルソフトを組合せてアプリケーション開発 上級者との差が出る箇所と対策 手順1~3で重要なことは、「対象動作の明確化」と、「サンプルソフトの分離読解」 です。分離解読とは、初期設定とループ処理を明確に分離して解読することで、処理内容は、大体把握すれば十分です(後述サンプルソフトの読み方 参照)。
上級者は、多くのサンプルソフトを経験しているので、的確に対象動作を絞り込め、分離解読が、早く深い点が違います。さらに、上級者は、個人的なテンプレートを既に持っているので、サンプルの流用、組込みとデバッグが効率よくできます。
弊社マイコンテンプレートを活用すると、
サンプルソフトの組込みが簡単な、テンプレート獲得 処理単体/結合デバッグが簡単で部品化も容易な、RAMを使った処理インタフェースの獲得
ができますので、上級者との差分を誰でも補えます。
サンプルソフトの選出 何回かサンプルソフトを読むと、より明確な対象動作が選べるようになります。逆に、サンプルソフトが見当たらない時は、絞り込みが不完全、または対象が間違っていると言えます。初めに全てのサンプルソフトをざっと眺めた後で、アプリをイメージするのも良い 方法です。
但し、スイッチ入力処理は、注意が必要です。スイッチには、チャタリング対策が必須です。この対策は2つあり、1つがハードウエア、もう1つがソフトウエアの対策です。両者併用もあります。ブログ記事 や、ネット検索すると、多くの情報がありますので、そちらも参照して下さい。
サンプルソフトの読み方 サンプルソフトは、「木を見て森を見ず」 にならないように、細かいことは気(木?)にせずに、初期設定とループ処理の2つに分けて 読みます。
初期設定は、コメントに注意し、周辺回路の使用方法が開発するアプリと同じがどうかを見極めます。同じなら、丸ごとそのままテンプレートへ流用 します。異なる場合は、データシートなどで変更箇所を特定し、実際にサンプルに変更を加え、結果が正しく動作することを確認しておきます。
ループ処理は、無限ループで処理するものと、割込みで処理するものに大別 できます。割込み処理は、基本的にそのままテンプレートへ流用します。
テンプレートの狙い:複数サンプルソフト流用 よほどの上級者やツワモノを除けば、アプリ開発は、サンプルソフトの流用が王道 です。敢えてリスクをおかしてサンプルソフト以外の方法でマイコンを動かす必要はないからです。ベンダサンプルは、典型的動作ですので、先のスイッチ処理の例外を除くと、流用可能なものが多いのも理由です。
但し、サンンプソフトは、1個の周辺回路の動作説明が主なので、実際のアプリで必要となる複数の周辺回路を組合せる記述はありません。これが、開発者毎に手法が異なる原因です。弊社テンプレートは、これに対して1つの解を提供します。
弊社マイコンテンプレートは、サンプル処理の流用が簡単で、複数サンプル処理を組込むのも容易 です。従って、サンプルを活かした動くアプリの早期開発 ができます。また、本テンプレートを用いれば、開発者毎で異なる開発手法を統一でき、可読性や流用性も高まります。次回、後半で詳細を説明します。
アプリケーション開発手順1~3のまとめ
細かい単位の対象動作サンプルソフトを見つけ、初期設定とループ処理の2つに分けて読む サンプルソフトを部品と見なし、複数部品の組合せでアプリケーションを開発 サンプルソフト獲得方法は、ベンダサイト、RADツールがある
次回は、手順4の部品化したサンプルソフトのテンプレートへの組込みとデバッグ、複数サンプルが同時に動くしくみを説明します。
補足:チューニングとマイコン性能 アプリケーション開発で最も厄介なのは、実はチューニングです。
アプリに最適なマイコンを選定していれば、一部アセンブラ化などのチューニングなしで動くアプリができます。しかし、この選定失敗、もしくは、選定マイコンが古いのにアプリ追加などで、性能を絞り出す場合などの、最後の手段としてチューニングもありえます。絶対に避けるべき だと思います。結局、高性能マイコンへの置換えという結果になります。
では、マイコン性能はどの程度が正解でしょうか? マイコンでシステムを制御する場合、通常アプリ以外の処理ソフト、例えば、ハード/ソフトの出荷時のセルフテストや、入力が一定時間ない時のデモンストレーション表示なども必要です(自動販売機などでおなじみですね)。ここでは、これらソフトを「システム運用ソフト」と呼びます。
これらシステム運用ソフトは、通常アプリ動作中には、並列処理をしませんので、消費するのはROM/RAMです。ソフト開発者は、ROM/RAM量を見積もる時に、これら通常動作には現れないシステム運用ソフトも考慮する必要があります。経験では、通常アプリと同程度、つまりトータル2倍のROM/RAMは必要と思います。
また、必要となるマイコン性能は、通常アプリと、上の例で示したようなシステム運用ソフトの両方で考慮すべきです。処理能力に十分な余裕がないと、再現性のない取れにくいバグ発生のリスクも高まります。この処理能力も、2倍程度の余裕が必要だと思います。
ハードウエア設計の「ディレーティング50%」と同様、2倍の余裕がマイコン設計には必要 と思います。