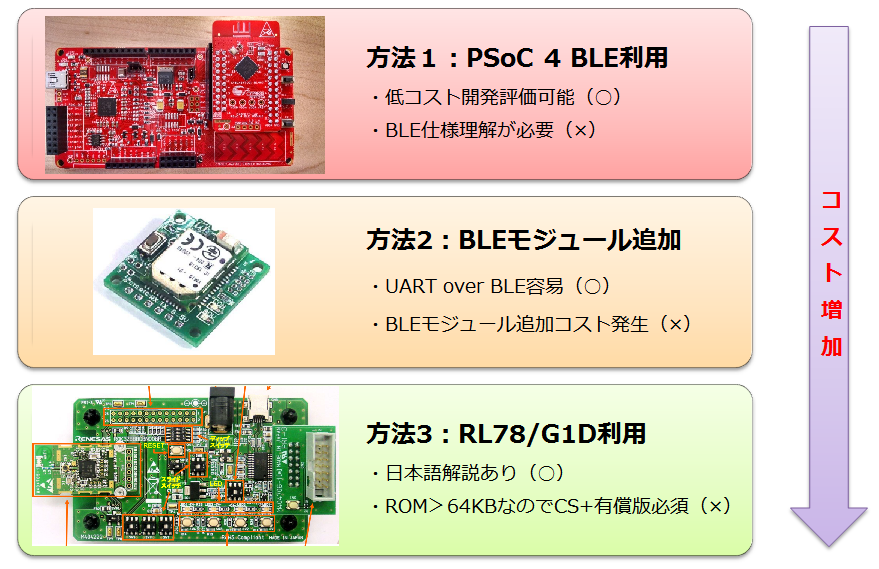
BLEモジュール追加の方法2は、マイコンUART入出力にBLEモジュールを追加する方法です。
マイコン以外にBLEモジュールが必要なため、追加コスト(図示、浅草技研BLESrialの場合4000円)が必要ですが、BLEを無線のドカン(UART over BLE)として使えるので、BLEをブラックボックスとして扱えるのが魅力です。
方法1と方法2のコスト差は、使用マイコンにも依存するので大差ありませんが、後で示す仕様変更時に差が出ます。
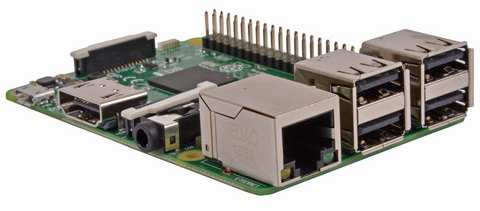
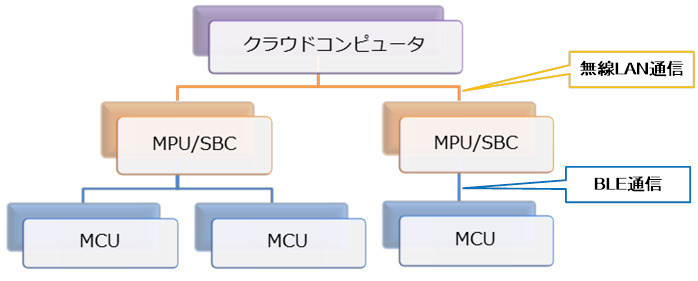
今回Raspberry Pi 3でIEEE 802.11b/g/n、Bluetooth 4.1(BLE: Bluetooth Low Energy)が追加実装されたことは、MCU、MPU/SBC間の通信手段としてこれら方式が有力であることを示しています。また、セキュリティや通信に処理能力が必要なので高性能化も解ります(既にこれら機能実装済みのDragonBoard 410cは、こちらを参照)。
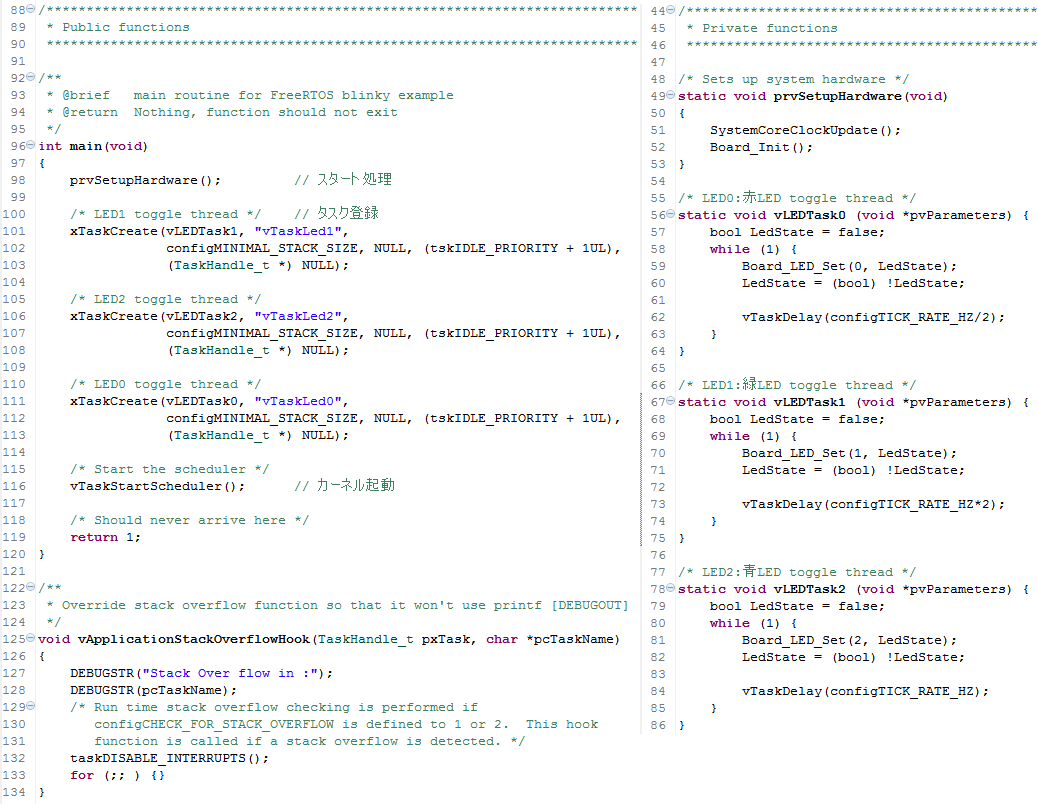
ARM Cortex-M0/M0+クラスのマイコンであるLPC824への上記FreeRTOS適用は、まれな例です。
なぜなら、多くの場合FreeRTOSは、Cortex-M3、例えばNXPならLPC17xx、またはより高性能なマイコンへの適用が多いからです(Cortexの性能比はコチラを参照)。天秤判断の結果でしょう。
GNU General Public License (GPL)のFreeRTOSは、その名の通り無償:Freeで多くのマイコン搭載実績もあります。しかし、ROM/RAMが少なく低価格を追求したCortex-M0/M0+クラスのマイコンには、少し「荷が重い」と個人的にも思います。
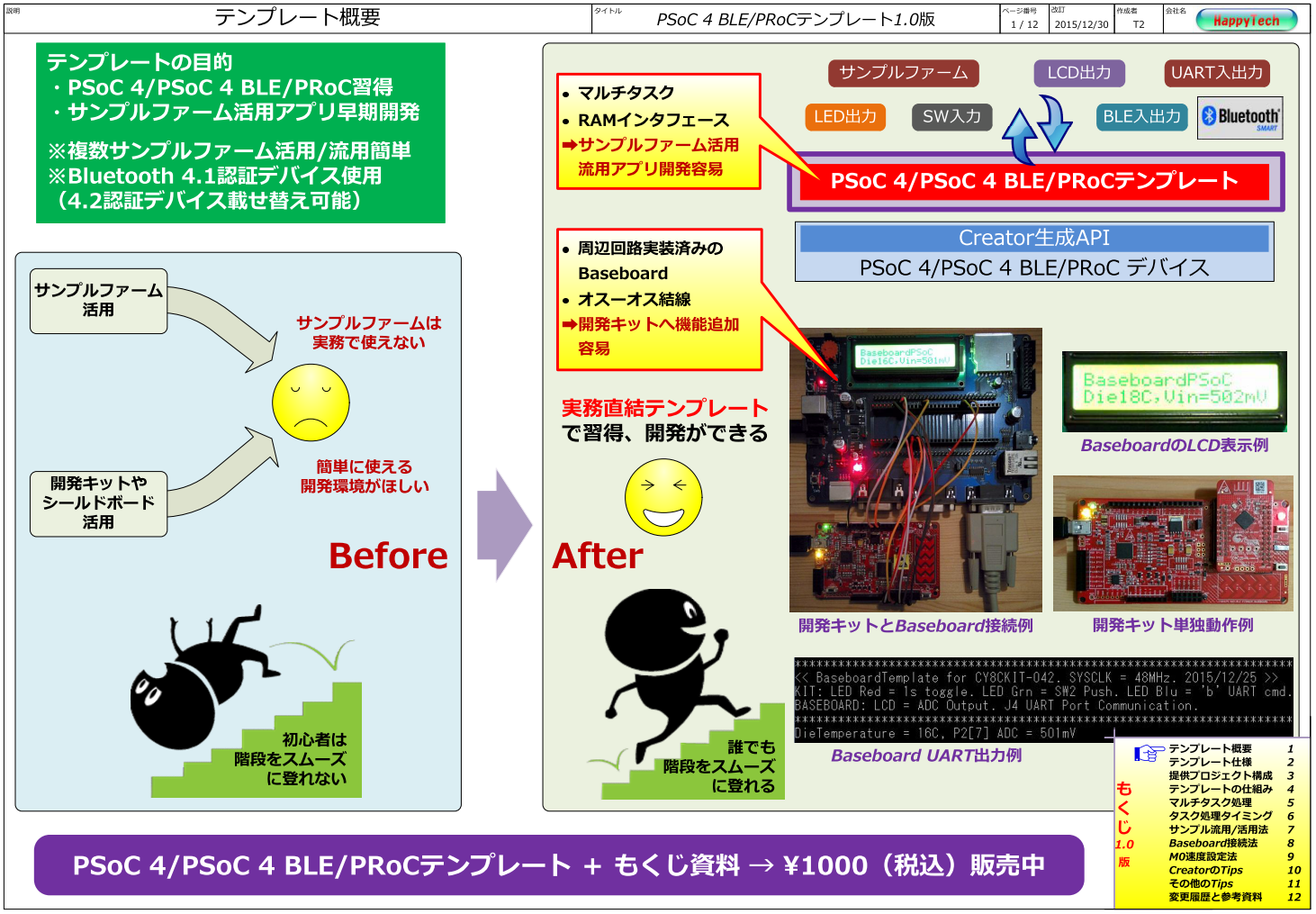
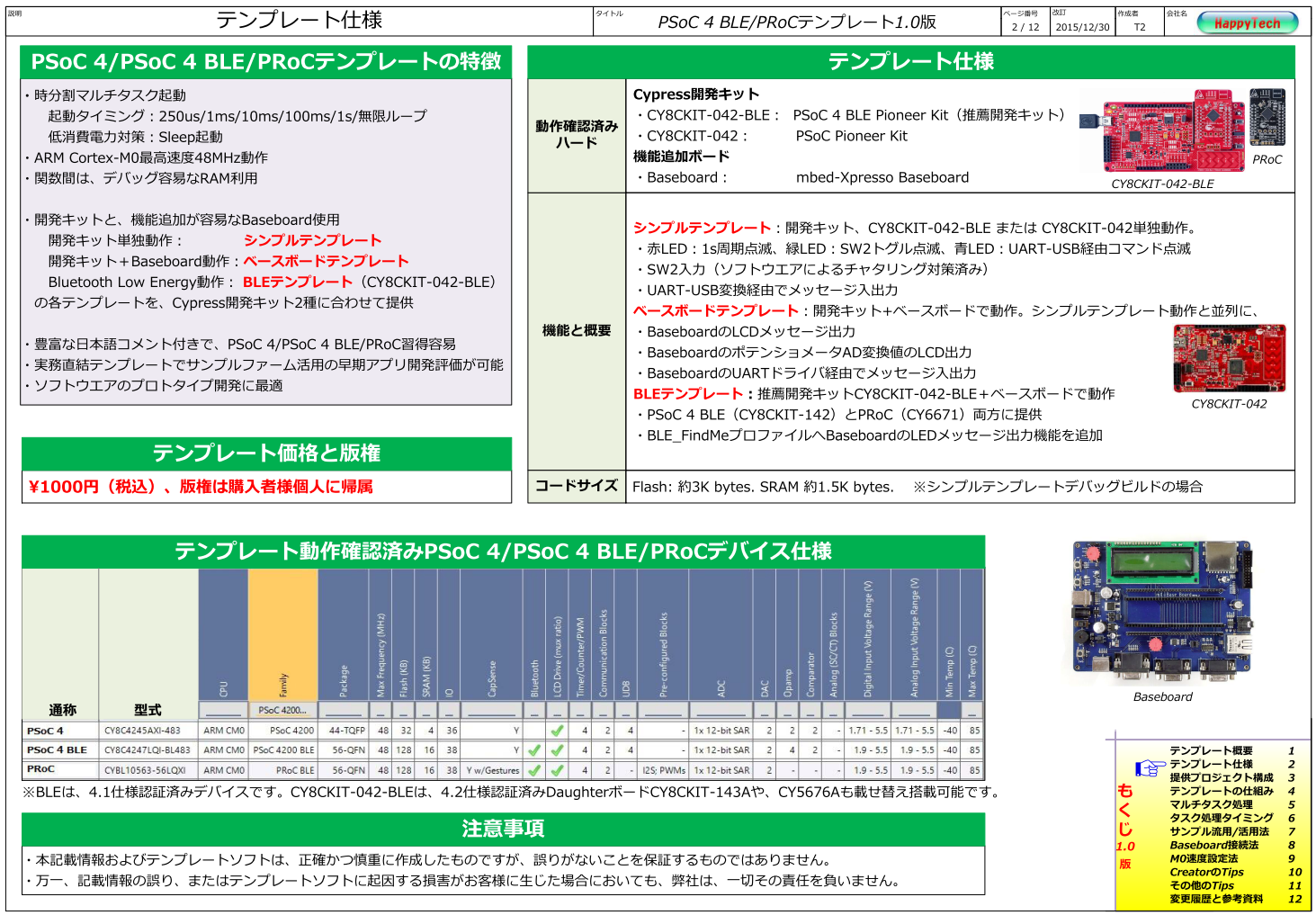
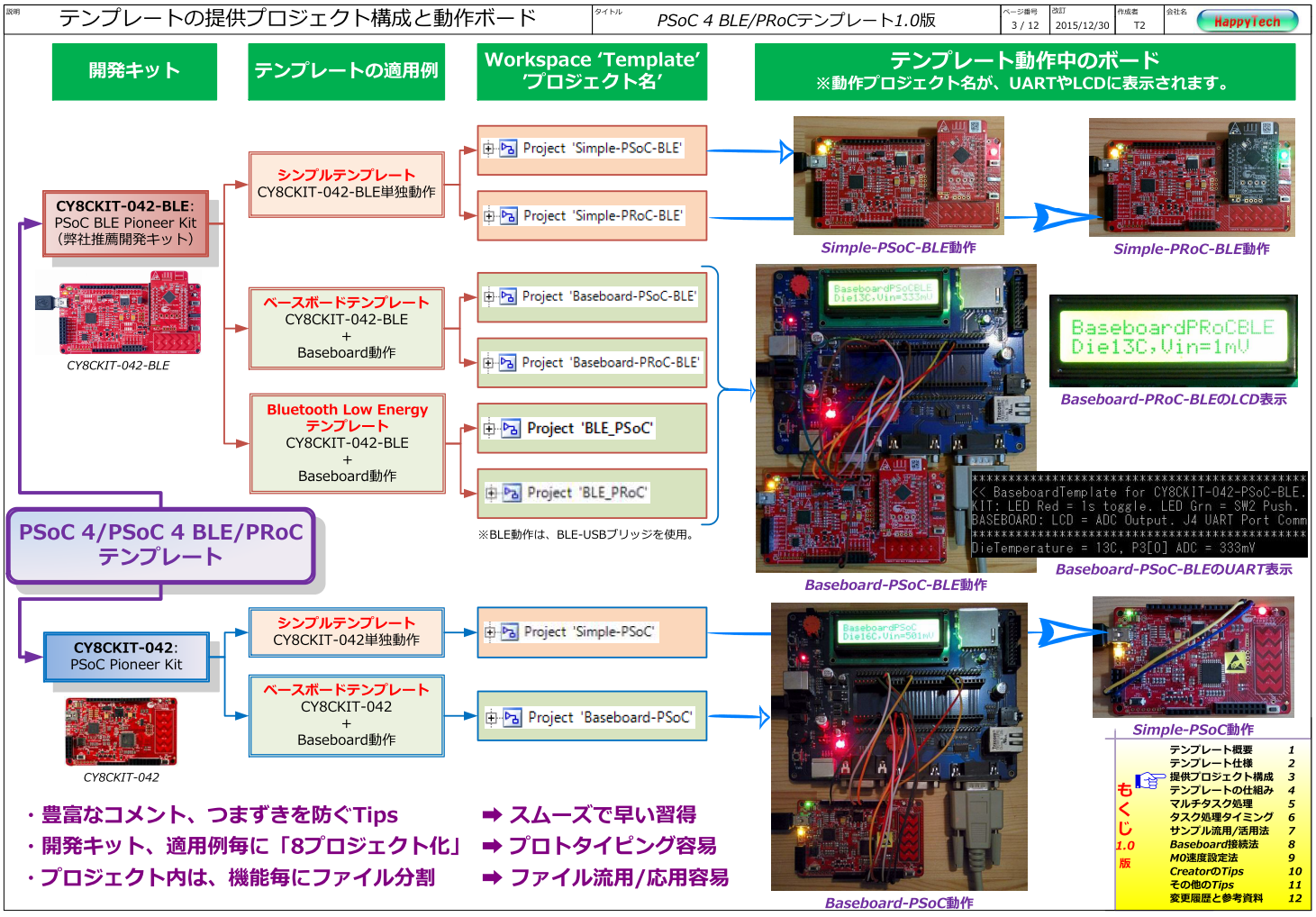
開発キット単独でテンプレートを動作させた時を「シンプルテンプレート」、開発キットとBaseboardを接続しLCDやUARTドライバ等の機能を追加して動作させた時を「ベースボードテンプレート」、CY8CKIT-042-BLEのBluetooth Low Energyを動作させた時を「BLEテンプレート」と名付けました。
Bluetooth 4.2認証デバイスの載せ替え搭載については、前回記事を参照ください。
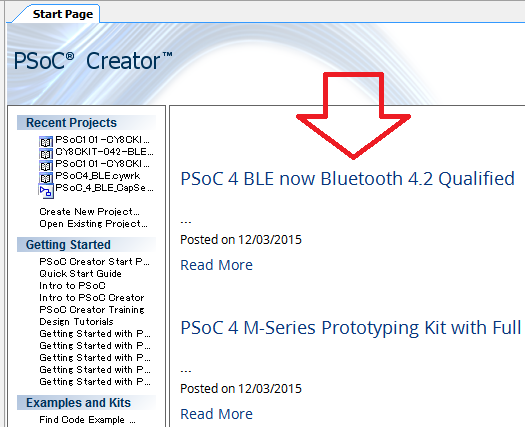
PSoC Creator起動時に表示されるStart Pageには、最近使ったプロジェクトやサンプルファームだけでなく、Cypressの最新情報が新しい順に表示されます。現在の最上位は、”PSoC 4 BLE now Bluetooth 4.2 Qualified”で、クリックすると当該ページがブラウザで表示されます。
Bluetooth 4.2仕様のBLEコンポーネントも、BLE 4.1現行版同様、簡単なプロパティ設定で使えます。
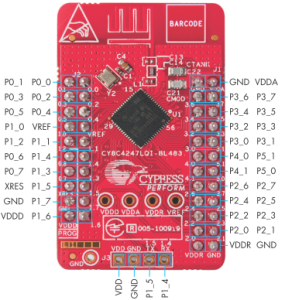
現行のCY8CKIT-042-BLE搭載のデバイスで4.2仕様は出来ませんが、同じ設計手法が使えるので安心です。
※CY8CKIT-042-BLE搭載デバイスは、以前の記事を参照してください。