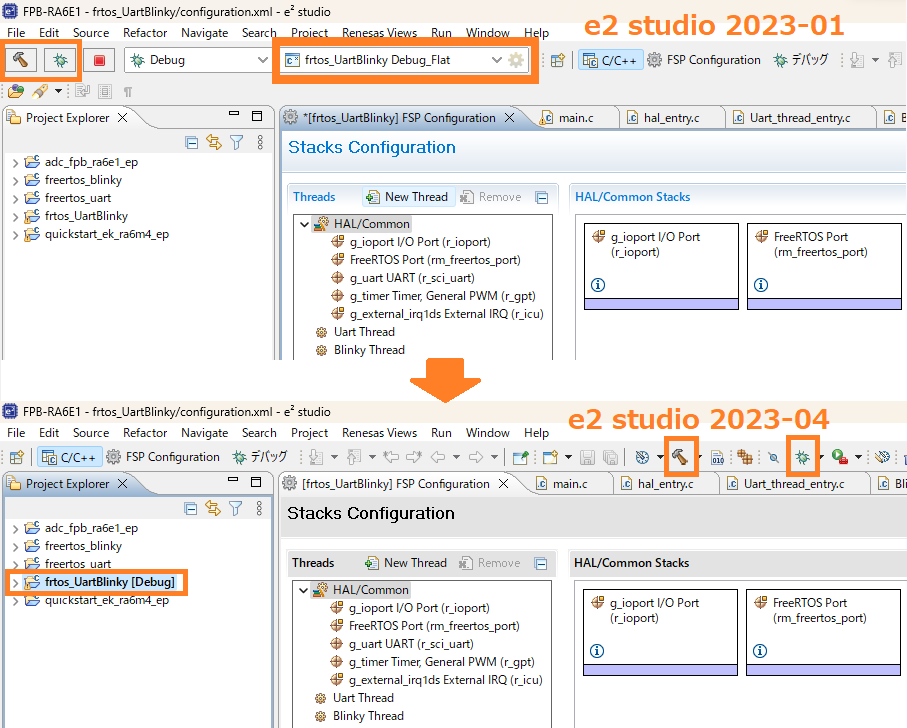
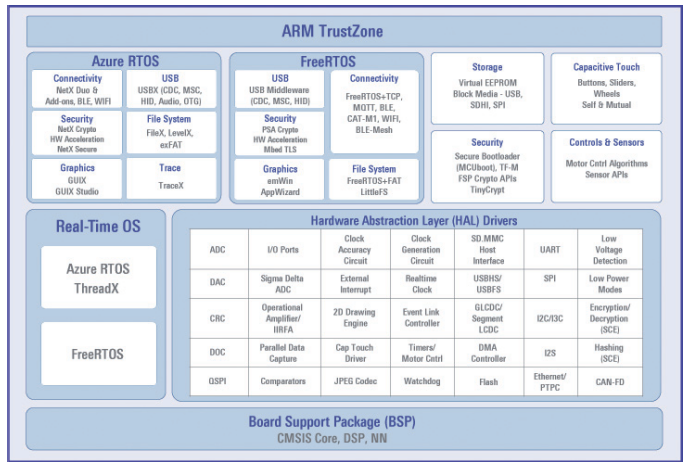
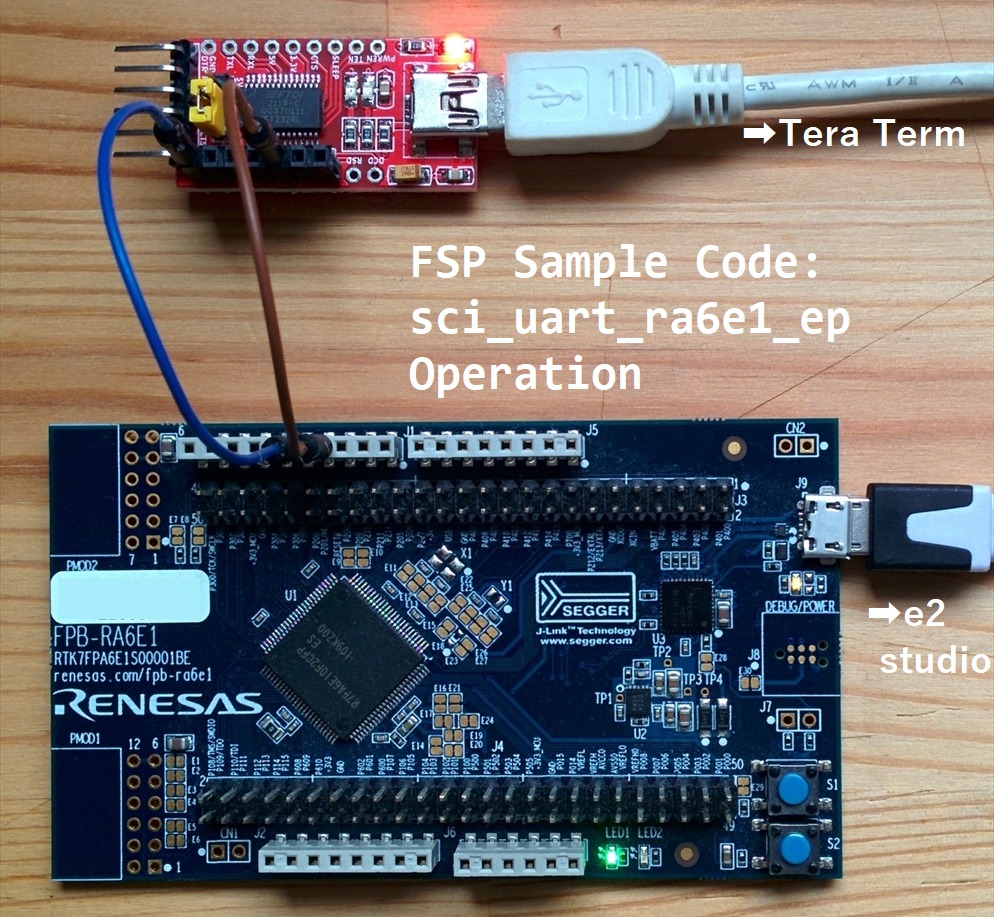
ルネサスFSP(Flexible Software Package)とサンプルコード利用の「実践的FreeRTOSアプリの作り方」を示します。下記の最新開発環境を用いました。古い環境や別評価ボードでも同じ結果が得られると思います。
全体流れ説明
先ず本FreeRTOSアプリ開発の全体の流れを説明します。というのは、組込み開発で良くあるサンプルコード付属説明:readme.txtとソースコード動作が不一致など、少々込み入った内容を含むからです。
FPB-RA6E1購入時インストール済みサンプルコード:qiuckstart_fpb_ra6e1_epは、ベアメタルソフト。readme.txt記載のSW1プッシュでLED1/2点滅速度変化とは不一致。
SW1プッシュでLED1/2点滅速度変化へFSP改造(1と2は、ベアメタル開発)。
FPB-RA6E1で、新規LED1/2点滅FreeRTOSアプリ作成(3以降は、FreeRTOS開発)。
作成FreeRTOSアプリのLEDスレッドへ、2.のベアメタルのSW1プッシュLED1/2点滅速度変化改造FSPと、ソースコード移植。
LED2は、FreeRTOSアプリエラー表示用とするため、点滅処理から削除。
本稿の背景
ベアメタル開発者は1と2、RTOS開発者は3以降が実行できれば、SW1プッシュでLED1点滅速度変更の1スレッドのみを持つFreeRTOSアプリを開発できます。
「実践的FreeRTOSアプリ開発」としたのは、0からアプリを開発するのではなく、豊富に提供される公式サンプルコードを流用・活用し、所望アプリを早く効果的に開発する例を示したかったからです。
RTOSのメリットを説明した資料は多く見かけます。しかし、具体的なRTOSアプリ開発方法を示す資料が少ないことも背景にあります。
以下、1~5の説明を加えます。細かい説明は後回しにし、まとめ章を先に読むとより全体が解り易いと思います。従って、まとめ章を先に記述します。また、最後の章に、RTOS開発の基盤となるRAベアメタルテンプレート宣伝(?)もあります。
まとめ:実践的RTOSアプリ開発方法
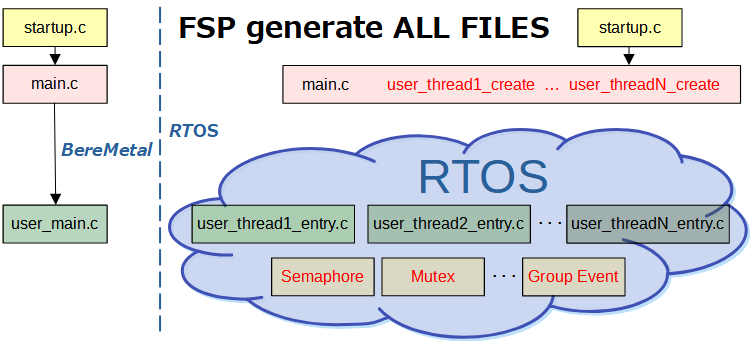
評価ボード実装済みLED1とSW1は、いわば開発アプリ正常動作中を示すインジケータです。開発したFreeRTOSアプリをテンプレートとし、所望機能のスレッドを追加していけば、最終的に様々なFreeRTOSアプリを早期に開発できます。
FreeRTOSをRAファミリFSP利用例としましたが、Azure RTOSでも同様です。
つまり、本稿のアプリは、RTOSテンプレート骨格 で説明した内容を、より具体化したものです。
もちろん複数スレッド追加時は、スレッド優先度やスレッド間制御(セマフォ/キュー/ミューティックスなど)の検討も必要になります。これらは、追加スレッドがほぼ完成した後の検討項目です。
先ずは、必要な個々のスレッドを単体・単独で開発し、その後、複数スレッド結合へと段階的に進める方法がRTOS開発には適していると考えます(関連投稿:FreeRTOS/Azure RTOSソフトウェア開発手法 )。
複数スレッドの検討方法は、文章量が増えるため割愛しました。別途改めて、投稿する予定です。
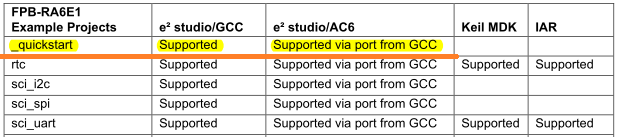
1:qiuckstart_fpb_ra6e1_ep動作とreadme.txt
サンプルコードzip内のqiuckstart_fpb_ra6e1_ep 評価ボードに初めからインストール済みのサンプルコードが、quickstart_fpb_ra6e1_epです。zip内に収められています。e2 studioは、zip内にあるサンプルコード説明書:readme.txtをIDE内にインポートしません。
Tips:zip解凍後のreadme.txtを、サンプルコードプロジェクト内へ手動でコピーしておくと、いろいろ便利。
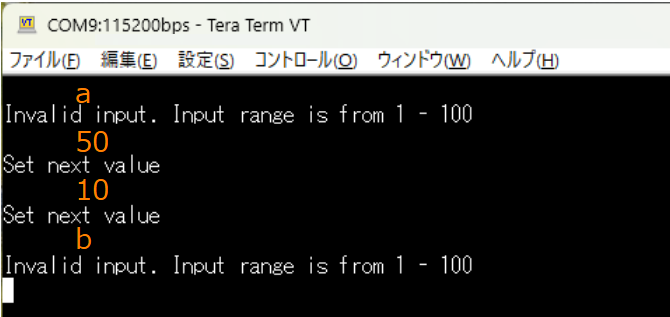
quickstart_fpb_ra6e1_epのreadme.txtが下記です。
quickstart動作とreadme.txtの不一致箇所 下線部:評価ボードSW1でユーザLED1/2点滅制御とありますが、この動作はFPB-RA6E1にはありません。しかし、quickstart_fpb_ra6e1_epソースコードには、SW1割込み処理:callback_irq1ds_buttonでLED1/2点滅delay変更処理が記述済みです。
これは、RAファミリのソースコードがHAL(Hardware Abstraction Layer)記述で、MCUが変わっても同じソースコードを使えるからです。別評価ボードのソースコードとreadme.txtを、そのままFPB-RA6E1へコピー流用している訳です。
組込み開発ではMCUの種類が多いため、このように既存資産をコピーして当該MCUコードや資料を作ることは良くあります。その結果、今回のようにreadme記述内容とサンプルコード動作が不一致なことも多々あります。
Tips:逆に上記は、MCUソフトウェア開発の本質が「サンプルコードやFSPなどの既存資産を上手くコピー活用すること」 を示しているとも言えます!
2:SW1プッシュ割込みでLED1/2点滅速度変化へFSP改造
readme.txt記述とサンプルコード動作不一致の原因が、FSPです。
そのままコピーできるreadmeやサンプルコードと異なり、FSPは、当該MCU毎に設定が必要です。不一致の原因は、FPB-RA6E1のFSP設定にミス(忘れ)があるからです。
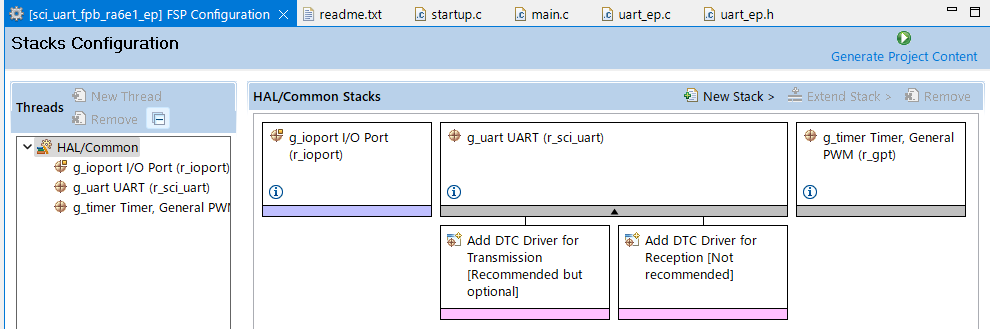
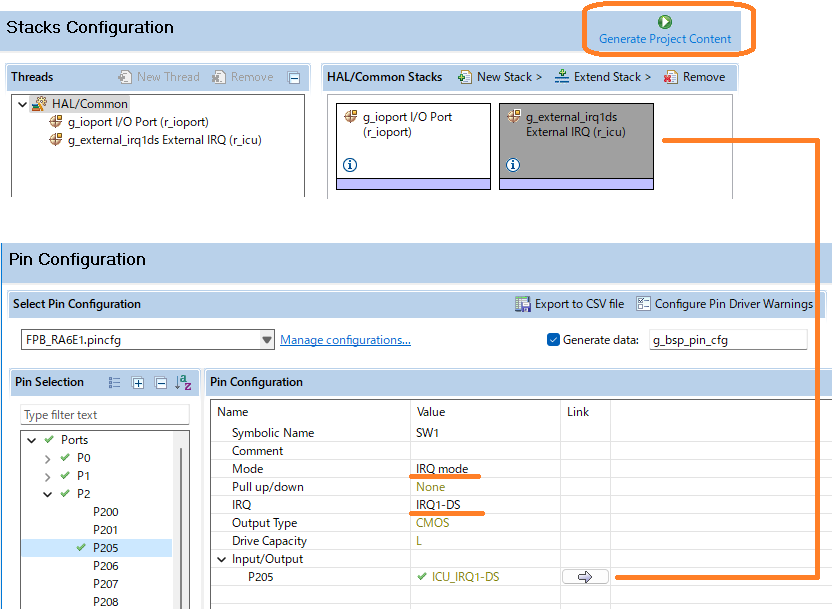
動作一致のためには、外部割込みコントローラ(External IRQ)とFPB-RA6E1のSW1(P205)の接続が必要です。下記のようにP205ピン設定を変更後、Generate Project Contentをクリックします。
quickstart_fpb_ra6e1_epを再ビルドし、評価ボードへダウンロードすれば、readme内容と同じSW1プッシュでLED1/2点滅速度が変わります。
外部割込みコントローラ(External IRQ)とS1(P205)を接続するピン設定 3:LED1/2点滅新規FreeRTOSアプリ作成
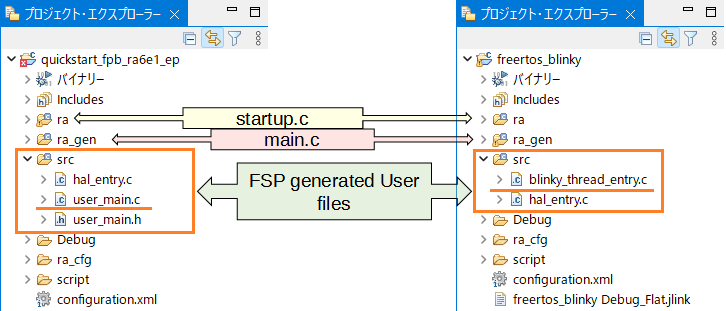
新規FreeRTOSアプリ作成は、ベアメタルアプリ作成と同じ方法です。そこで、本稿は、ベアメタル作成との差分のみを示します。
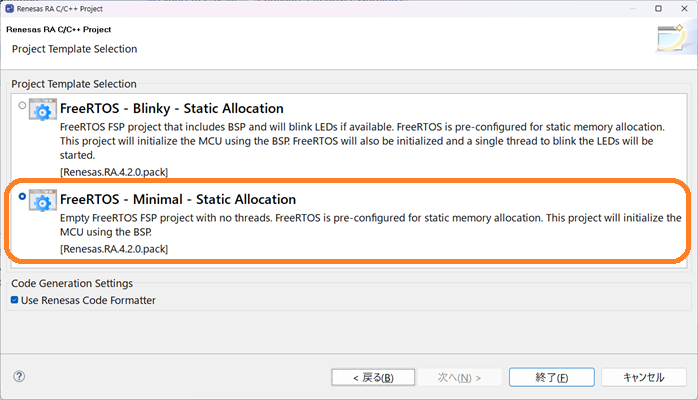
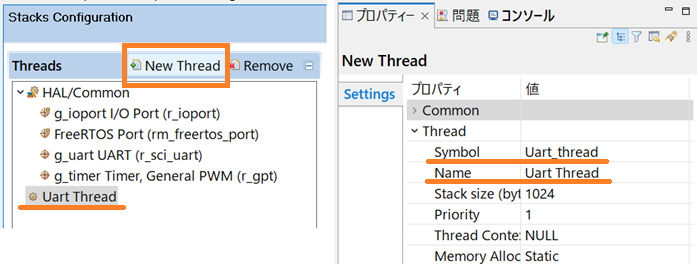
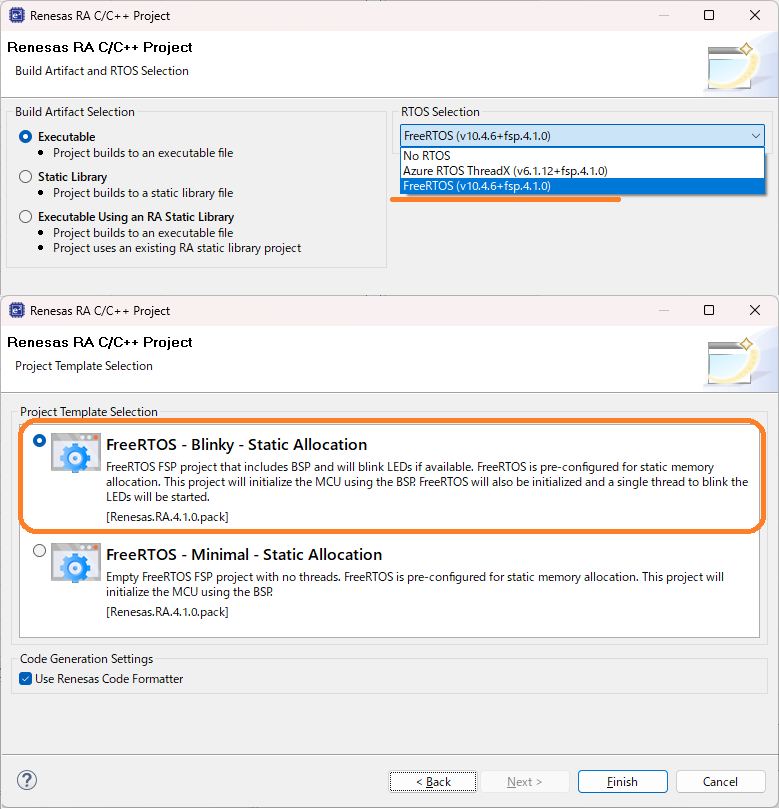
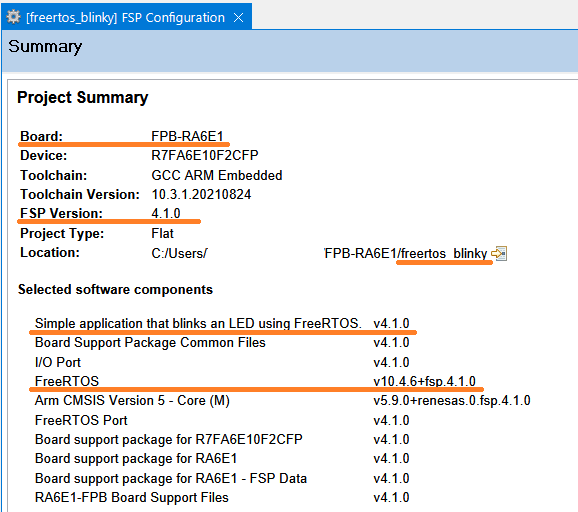
LED点滅の新規FreeRTOSアプリ作成(ベアメタル作成との差分) 新規作成FreeRTOSプロジェクト名は、freertos_blinkyとでもしてください。FSP Summaryが下記です。
FSP Summary このfreertos_blinkyを評価ボードへダウンロードすると、LED1/2が1秒毎に点滅します。生成したLEDスレッド:blinky_thread_entry.cのvTaskDelay(configTICK_RATE_HZ)が、1秒点滅の仕組みです。
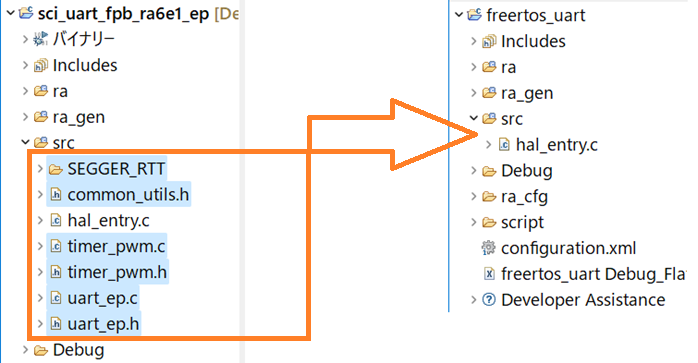
4:LEDスレッドへ、2:SW1プッシュLED1/2点滅速度変化改造FSP移植
2:で改造したSW1割込みでLED1/2点滅速度を変える機能を、3の新規FreeRTOSアプリへ移植します。
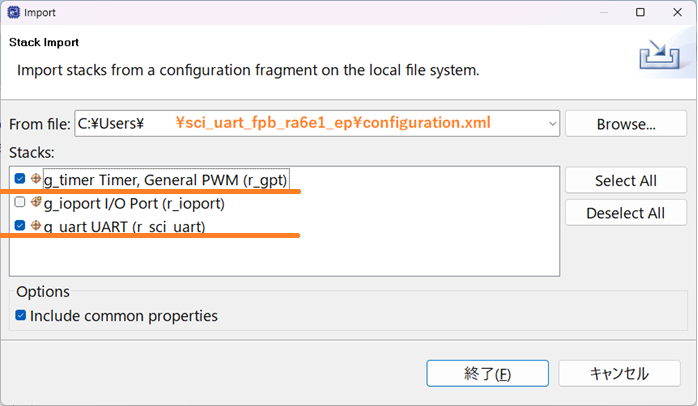
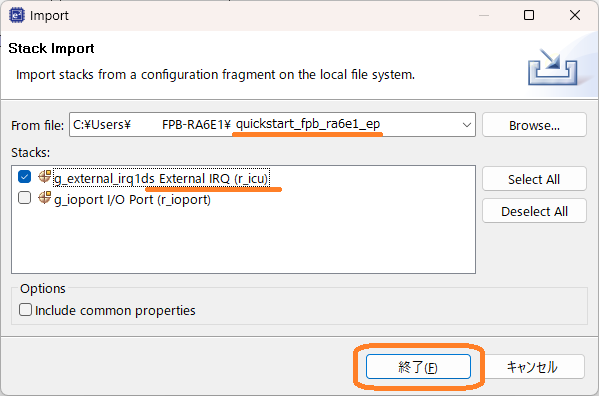
freertos_blinkyのFSP Stacksタブを選び、画面上で左クリックしImportを選択します。From fileにquickstart_fpb_ra6e1_epを選び、configuration.xmlを開きます。Stack ImportでExternal IRQを選ぶとquickstart_fpb_ra6e1_epの割込みコントローラ設定がfreertos_blinkyへ移植できます。
Tips:移植するFSPスタック数が多い時は、Import機能が便利。
FSP Import しかし、割込みコントローラとSW1(P205)間の接続はImportできません。そこで、1:と同様にP205ピン設定を割込みコントローラと接続し、Generate Project ContentクリックでFSP移植は完了です。
Tips:FSP Importは簡単便利だが、上記のように同一MCUであっても、ピン設定はImportされない。また、ピン設定が無くてもエラー表示もない。代替方法に、New Stackクリックでスタック群から追加機能を選ぶ方が、ピン設定忘れが少ないかもしれない。
次に、SW1割込み処理:callback_irq1ds_buttonを移植します。
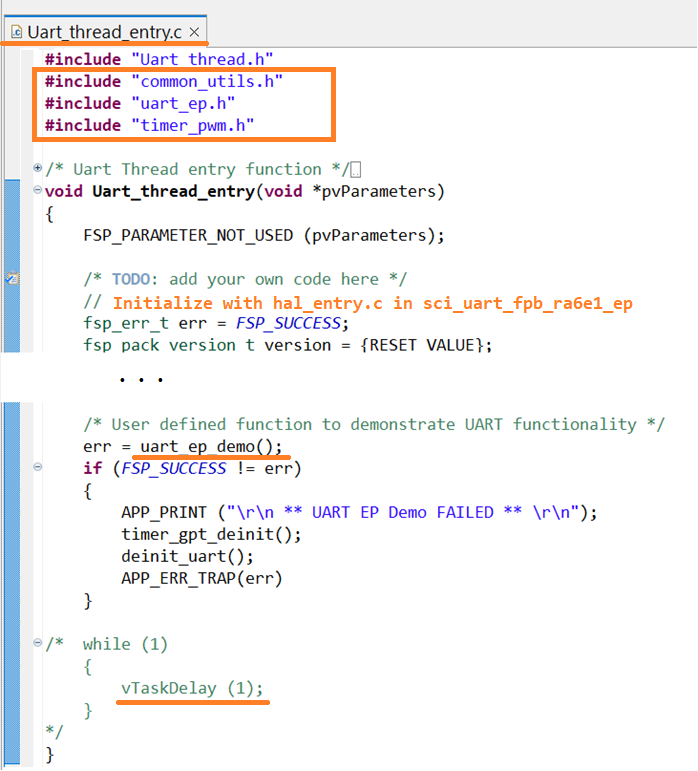
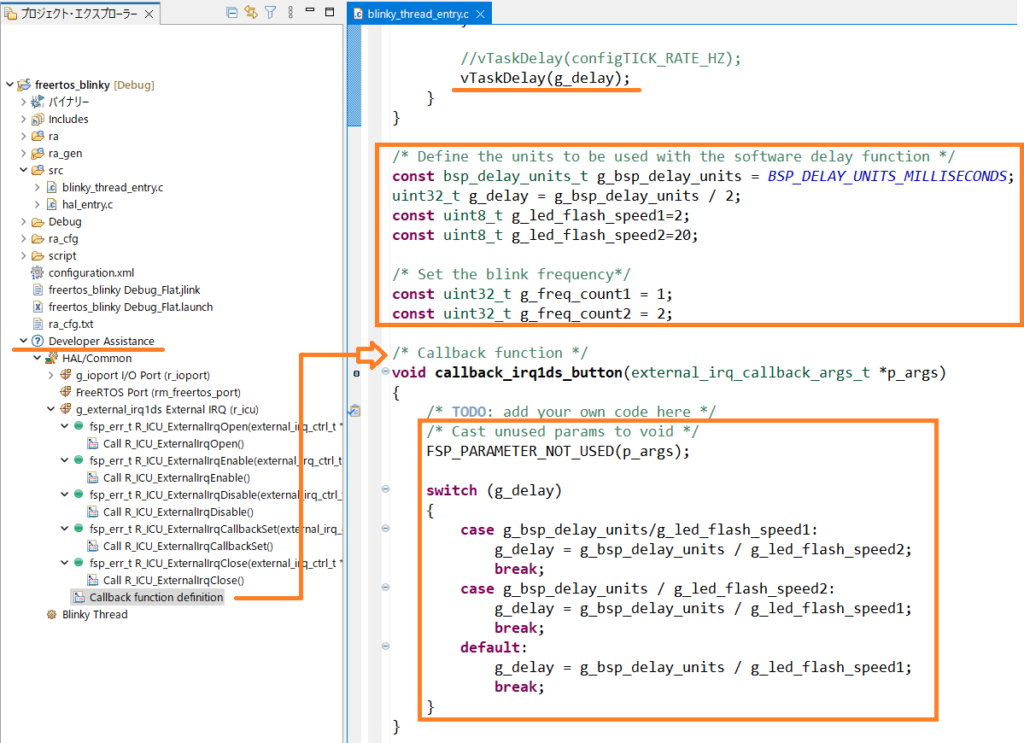
callback_irq1ds_button処理は、e2studioのDeveloper Assistanceを開き、callback_function_definitionをクリックし、blinky_thread_entryの後へペーストで追記します。今回は、TODO:add your own code hereコメント後へ、quickstart_fpb_ra6e1_epのSW1割込み処理をコピー&ペーストし移植します。
コピー後エラーが表示される箇所は、全て定数未定義部分ですので、quickstart_fpb_ra6e1_ep定数部分もコピー&ペーストします。
Tips:e2 studioは、デフォルトではソースコード変更後、このように即コンパイルエラーを表示。
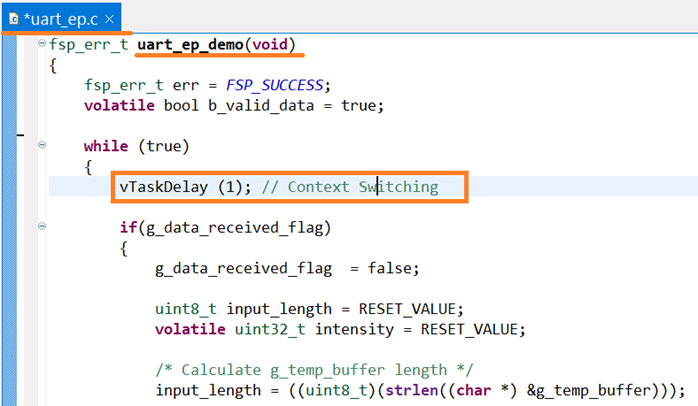
最後に、vTaskDelay(configTICK_RATE_HZ)のconfigTICK_RATE_HZ を、割込み処理で作成したg_delayへ変更します。
以上で、割込み処理の移植完了です。ビルドし、SW1でLED1/2点滅速度が変わることが確認できます。
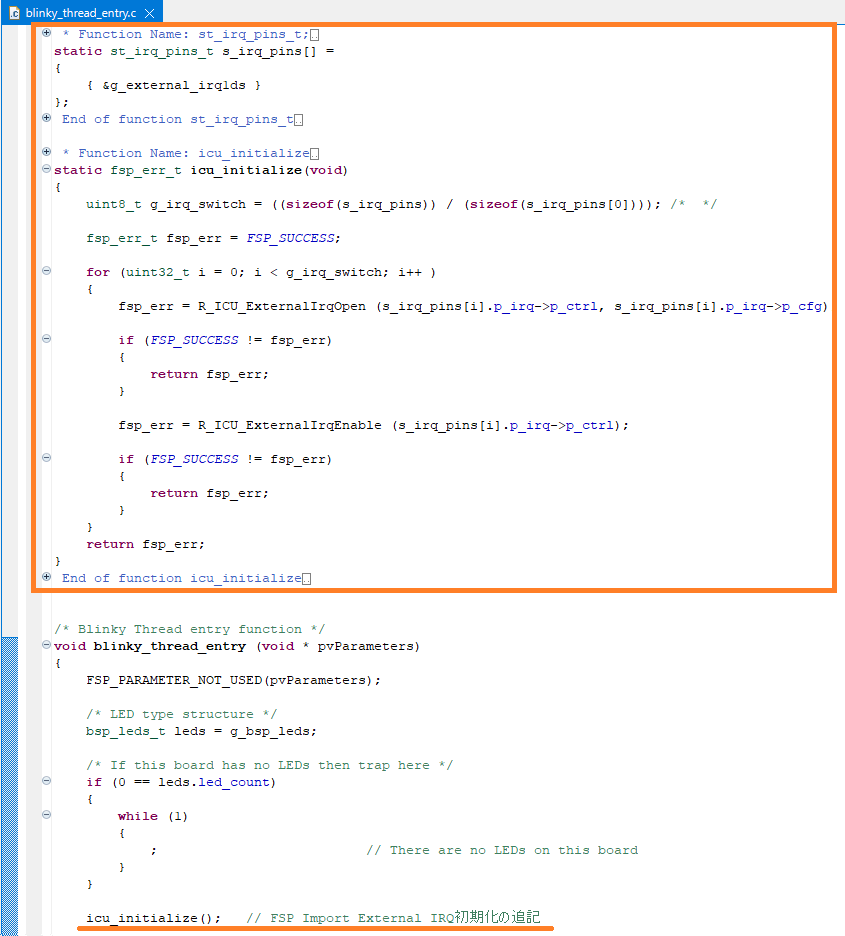
SW1割込み処理:callback_irq1ds_buttonの移植 ※12月10日追記 :FSP Importした割込みコントローラ初期化の移植記述を忘れていました。追記します。
Importした割込みコントローラの初期化:icu_initializeも、下図のようにblinky_thread_entry.cへ移植します。
割込みコントローラの初期化処理の移植 5:LED2点滅処理削除
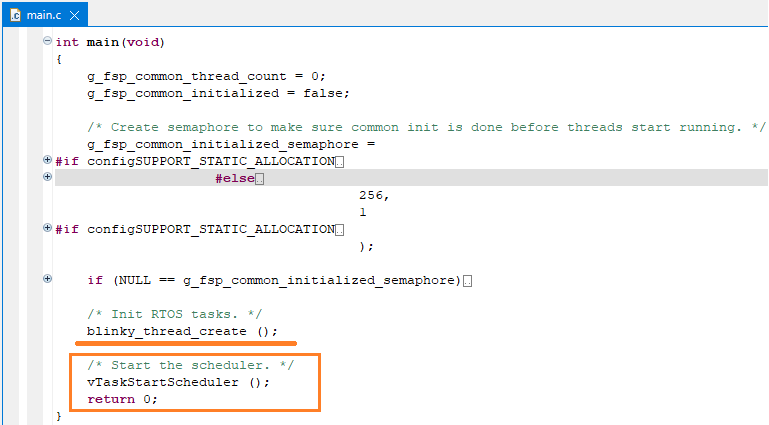
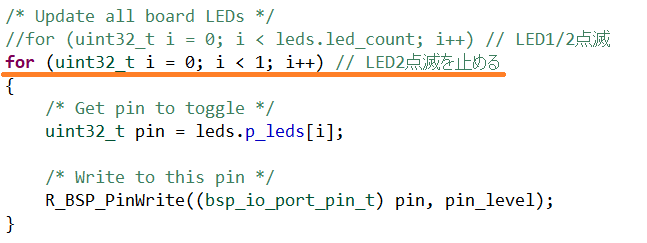
LED2は、FreeRTOSアプリのエラー表示に使います。例えば、追加したスレッド初期設定に失敗した時のインジケータなどです。そこで、下記のようにLED2をLEDスレッドの点滅処理から外します。
LED2点滅処理削除 以上で、SW1プッシュでLED1点滅速度変更の1スレッドのみを持つFreeRTOSアプリ完成です。
このFreeRTOSアプリへRTOSテンプレート骨格で投稿した7メニュー形式表示、LED2エラー表示などの機能を更に追加しFreeRTOSテンプレートとします。
FreeRTOSテンプレートは、全てのFreeRTOSアプリ開発の出発点となり、所望スレッド機能を追加していけば、効率的に様々なRTOSアプリ開発が可能です。
Tips:本稿はFreeRTOSテンプレート開発方法に重点を置き投稿。実FreeRTOSテンプレートは、もっと解り易い構造とソースコードで提供。
RTOS開発はベアメタル開発スキル必須
前章1~5から「RTOS開発には、ベアメタル開発スキルが必須」であることがお解り頂けたと思います。
組込み開発は、説明不足の事柄が非常に多いです。また、サンプルソフトとreadme.txtなどの説明不一致も多々あります。説明対象を初心者/中級者の誰にするか、どこまで説明するか、などなど読者を絞り難いこと、説明側にとっては、自明の理 の内容が多いことがその理由です。
本稿で追記したTipsや背景となる技術スキルが無いと効率的に先へ進めないと思います。ベアメタルを補う目的のRTOS開発ではなおさらです。
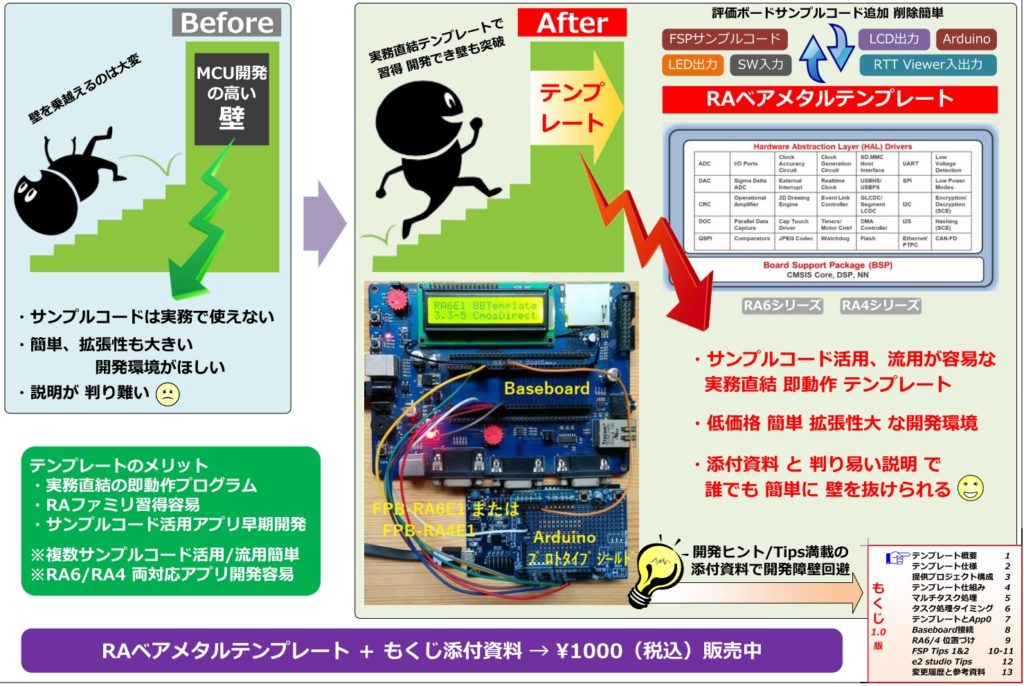
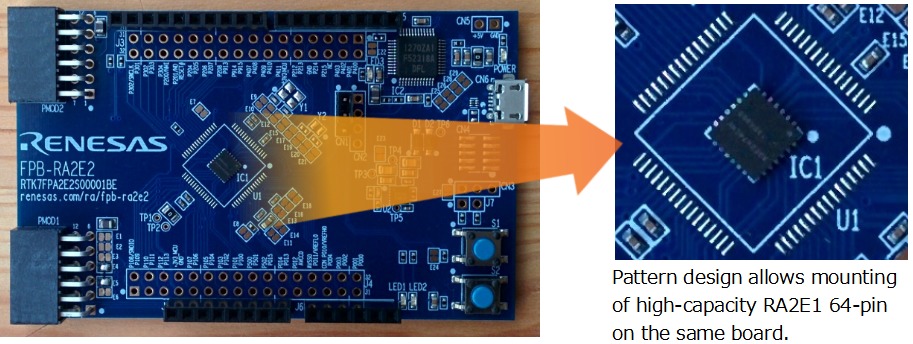
RAファミリで、FSP利用の効率的なベアメタル開発スキルを身に付けるには、弊社RAベアメタルテンプレート がお勧めです。ソースコードに豊富な日本語コメントを付加し、付属説明資料にはTipsやFSPノウハウなども記載しています。RAベアメタルテンプレート説明サイトは、コチラ をご覧ください。
ルネサス以外のベアメタル用テンプレートも多数 ご用意しております。また、NXPのFreeRTOSアプリケーションテンプレート も販売中です。