Amazon:アマゾンがFreeRTOSをカーネルにして、IoT端末とのクラウド接続、セキュリティ確保、将来的にOTA:Over The Airによるアップデート機能をライブラリで提供というニュースが入りました。
嬉しいのは、「FreeRTOS」と「OTA機能がRTOSで提供」されることです。
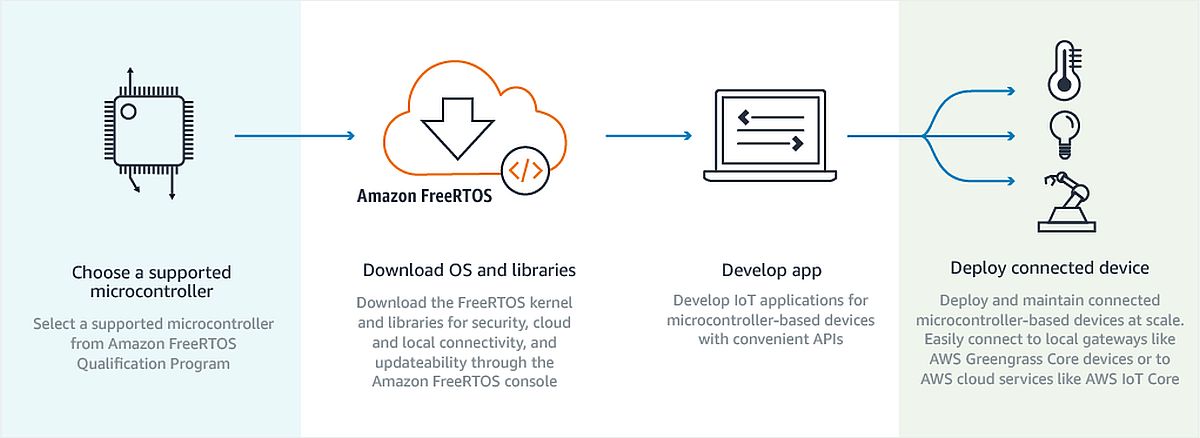
Amazon FreeRTOS
IoT端末とクラウドを接続するには、IoT通信プロトコルが必要です。BLE:Bluetooth Low EnergyやThreadが有力ですが、国内外の網側事情が異なるため、実質的なIoTプロトコル実装は間違いなく大変です。
もしこのIoT通信機能が、最大手アマゾンの無償ライブラリで提供され、マイコンUARTと同様にIoT Communication APIを使え、しかもセキュリティ対策済みであるならば、IoT端末は爆発的に普及するでしょう。普及の足かせとなっているIoT通信とセキュリティ問題が解決されるからです。
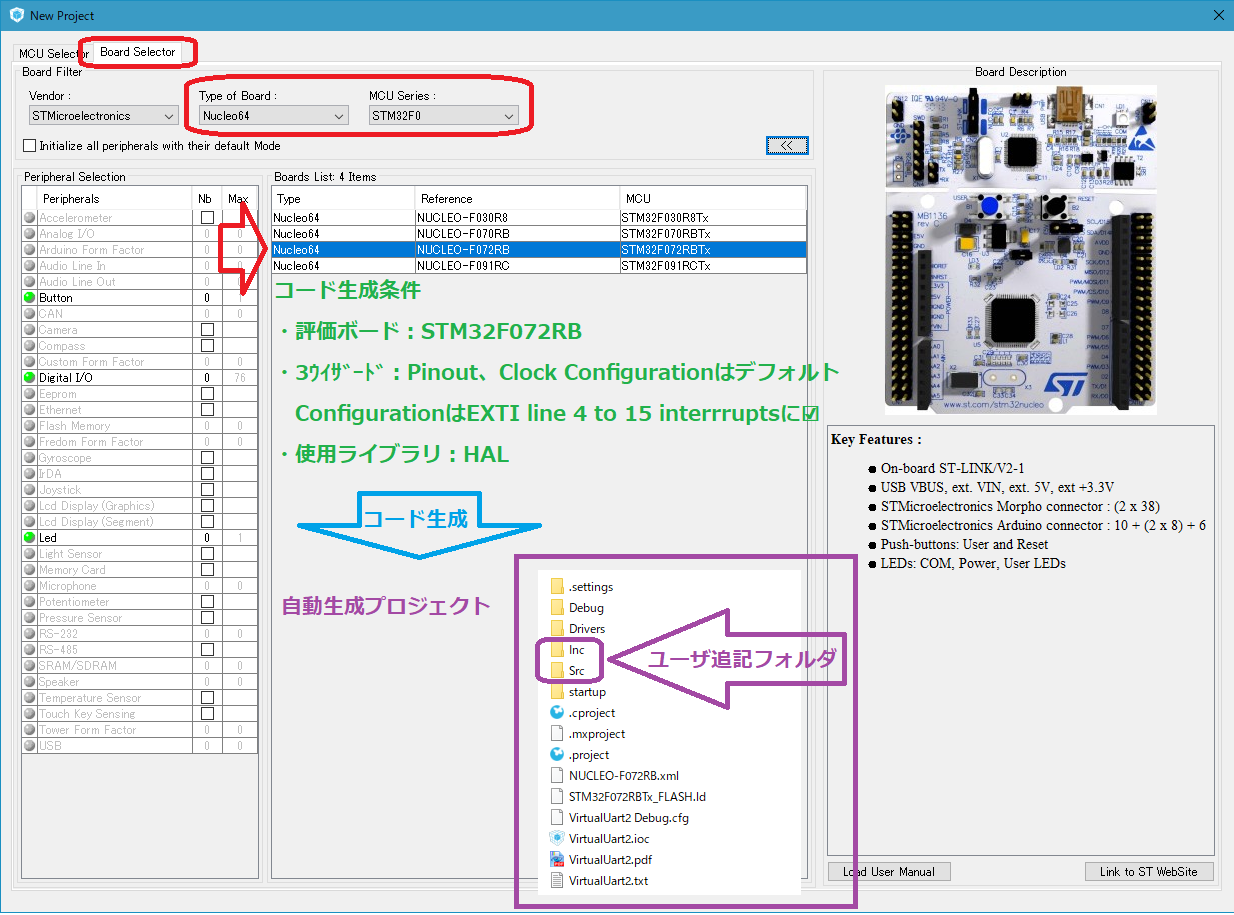
現在Amazon FreeRTOSのハードウエアパートナーは、テキサス・インスツルメンツ:TI、マイクロチップ、NXP、STマイクロエレクトロニクスの4社で、NXPは、LPC54018 IoT Module、STMは、STM32L4 Discovery Kit IoT Node評価ボードでサポートするそうです。
NXP、STMいずれもかなり高性能MCU評価ボードを使っていますが、これは高機能IoTエンド端末(≒簡易スマホ)を想定しているからだと思います。FreeRTOSカーネルなので、ROM/RAMが少ない低価格IoTエンド端末にも実装できるハズです。
弊社ブログでも紹介してきたFreeRTOS自身は、様々なベンダの低価格MCUにも実装実績があります。
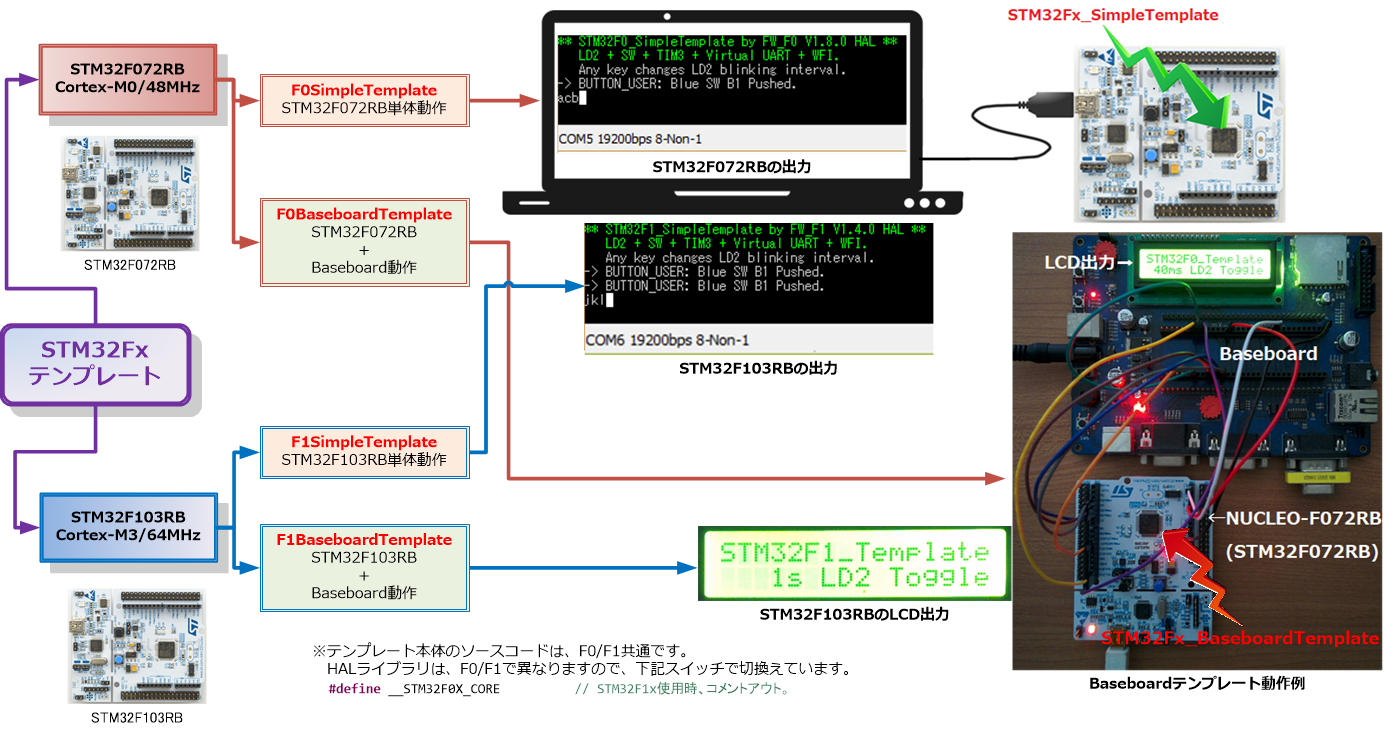
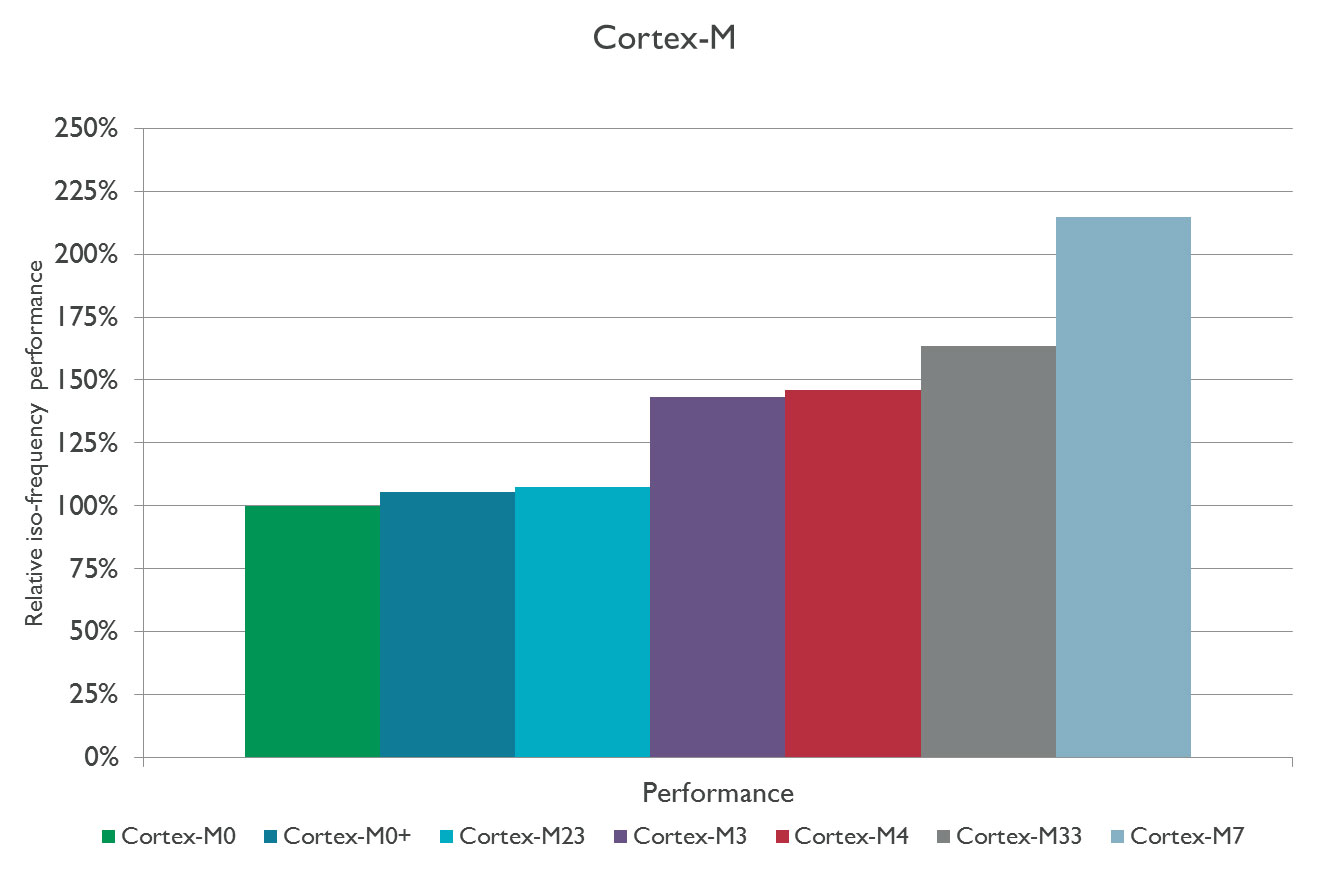
残念ながら弊社のFreeRTOSサンプルソフトは、NXPのLPCXpresso824-MAX上で完全動作しているとは言えませんが、近いうちにSTMのSTM32F103RB(Cortex-M3:64MHz、ROM/RAM:128KB/20KB)で再チャレンジし、新たにFreeRTOS版のテンプレートを開発できないか検討中です。
※FreeRTOSサンプルソフトは、2020年版に更新しました。LPCXpresso824-MAXサンプルソフトは削除しました。
OTA機能
出荷後の組込みソフトを更新したいことは良くあります。但し、Windows更新でも失敗があるように、技術的にハイリスクで、また更新費用を顧客が負担してくれないこと(ノーリターン)も多いので、悩ましい事柄です。
Amazon FreeRTOSのOTAがRTOS関連のみか、または、RTOSにとってのアプリ、つまり開発ソフトも含むかは不明ですが、たとえRTOSのみであってもOTAが提供されれば好都合です。セキュリティ起因の不具合解消に役立つからです。
従来のベアメタル開発でもOTA関連の資料は、英語版で難解な記事はあります。しかし、私の場合は、結局現地でIDE書き換えの経験が多いです。リクスを少しでも下げたいのもあります。RTOSが機能提供してくれれば、責任転嫁(?)ですが助かります。
弊社FreeRTOSへの取組み
IoTクラウドサービスは、アマゾンのAmazon Web Services IoT:「AWS IoT」が先行し、マイクロソフトの「Azure IoT」、これらを追いかけるグーグルの「Weave」とアップルの「HomeKit」、その後ろにARMの「mbed Cloud」という状況だそうです。アマゾンは最先端を走っているのです。
先行アマゾンが2017年末に発表したAmazon FreeRTOSの詳細は不明ですが、IoT MCUのRTOSにFreeRTOSが有力であるのは、確実になりそうです。
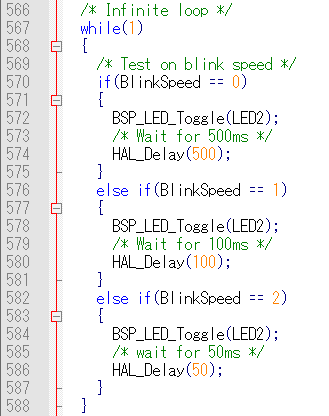
FreeRTOSソフト開発の場合、タスク自体は簡単で単純な初期設定+無限ループ構成です。タスク同期やタスク通信にRTOS APIが使えれば、それ程難しくはないと(今は)考えています。この考え方が、タスクが増えたりプライオリティを変えたりしても正しいか、間違っているかは、実践経験あるのみです。
個人で実践できるFreeRTOS動作環境の構築が、弊社FreeRTOS版テンプレートの目標となりそうです。