前稿のRAファミリ評価ボードRA4E1 Fast Prototype Board(以降FPB)を入手、RA/REテンプレート検討に着手しました。
FPB開発に用いるルネサスIDE:e2 studio(以降e2)とAPI生成ツール:Flexible Software Package(以降FSP)は、NXPやSTマイクロなどのEclipseベースIDEの利用者が?に思う箇所があると思います。
ルネサスIDE:CS+ユーザでも、同様にこの?を感じると思いますので、対策と評価ボードFPBの使い方を示します。
e² studio
Eclipse IDEをベースとしたRAファミリ統合開発環境:IDEが、e2、API生成ツールが、FSPです。
e2は、ARMコアを含む全てのルネサスMCU開発用の新世代IDEで、古くからあるRL78ファミリやRXファミリなどのルネサス独自コア専用統合開発環境CS+の後継IDEとして登場しました。但し、CS+は、現在でもRL78/RXファミリ開発に使えます。
e2は、MCUファミリ毎にコンパイラを切替えることにより、全ルネサスMCUの共通IDEとして動作します。MCUファミリのコンパイラは、普通1種類です。ところが、RAファミリには、GNUとARM Compiler V6の2種類が用意されており、どちらも無償です。
GNUとARM Compiler V6?
e2インストール時、デフォルトでインストールされるコンパイラは、GNUです。ARM Compiler V6は、後から追加インストールが必要です。最初の?は、両コンパイラの“違いは何か”です。
次章で示すFSPやTrustZone利用に差が生じるのであれば、問題です。
ルネサス資料を探しましたが、結局、コンパイラ差は分かりません。最近では殆ど行わないアセンブラデバッグが無ければ、コンパイラはどちらでも構いませんので、デフォルトGNUで当面はOKとします。
Flexible Software Package (FSP)?
RAファミリ専用のAPI生成ツールが、FSPです。動画:Generating Your First RA FSP Project(8:25)で使い方が分かります。
簡単に説明すると、スタックと呼ぶ開発プロジェクトで使用するHALドライバやRTOSなどのミドルウェアパタメタをGUIで設定後、e2のGenerate Project Contentをクリックすると、Developer Assistance内に全てのAPIが自動生成され、その中から使用するAPIを、ユーザ自身でソースコード任意場所にドラッグ&ドロップする使い方です。
ソースコード任意場所にAPIを配置できるのは、親切とは言えません。NXPやSTマイクロのコード生成ツールでも、API追加箇所にコメント付きのソースコードが生成されます。しかし、FSPは、ソースコード上のどこにでもAPIを設置できます。
API使用順序、設置場所、パラメタの意味が予め解ってないと、適切なコーディングは困難でしょう。後述する多くの公式サンプルコード(スタック利用例)がありますので、これらを参考に習得する必要があります。
hal_entry.c?
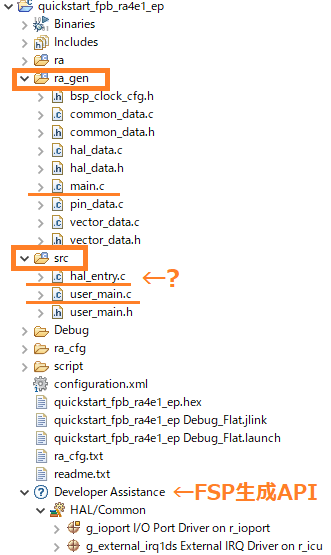
Generate Project Contentのクリックで生成されるのがAPI本体、つまり、ra_genフォルダ内のmain.cを含むスタックのドライバ関数群です。ra_genフォルダは、FSPが生成するコードの格納場所です。
これらとは別のsrcフォルダ内に見慣れないhal_entry.cファイルがあります。srcフォルダは、ユーザが追加するコードの格納場所です。
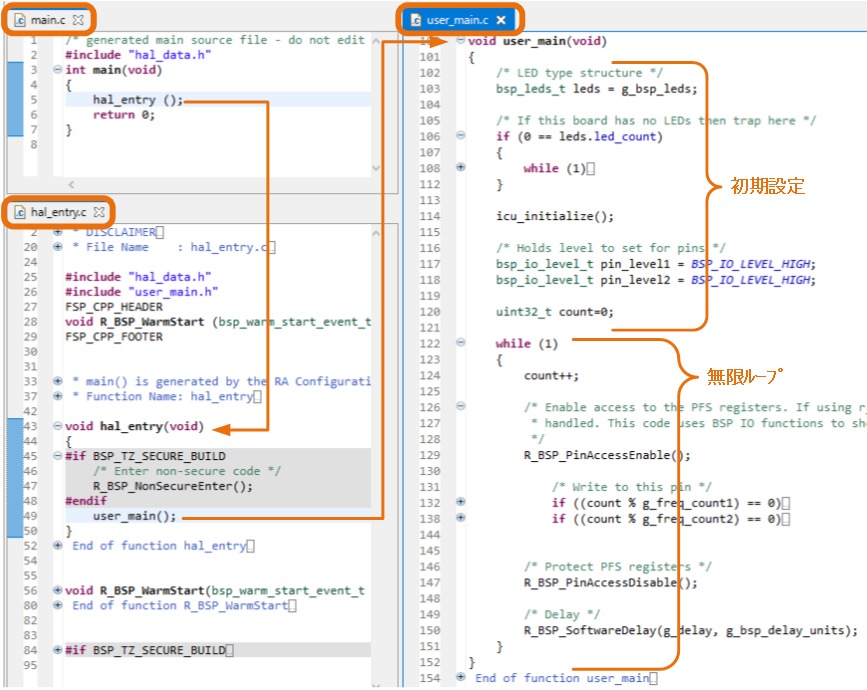
FPB出荷時にインストール済みのquickstart_fpb_ra4e1_epプロジェクトを読むと、main.c→hal_entry.c→user_main.cとコールされ、結局、user_main.cに一般的なIDEでユーザが追記する初期設定と無限ループを記述するのが、FSPでのユーザソースコード記述作法のようです。
※一般的なIDEでユーザが追記する初期設定と無限ループについては、基本のキ3章まとめを参照してください。
readme.txt?
公式サンプルコードをe2へインポート後、readme.txtでサンプル動作内容やFPB追加配線の必要性が分かります。バグだと思いますがe2(2021-07)は、サンプルコード付属readme.txtがプロジェクト内へインポートされません。
筆者は、手動でインポートしました。例えば、sci_uart_fpb_ra4e1_epプロジェクトは、追加配線無しではTera Term動作確認ができませんので、readme.txtを読み、追加配線が必須です。
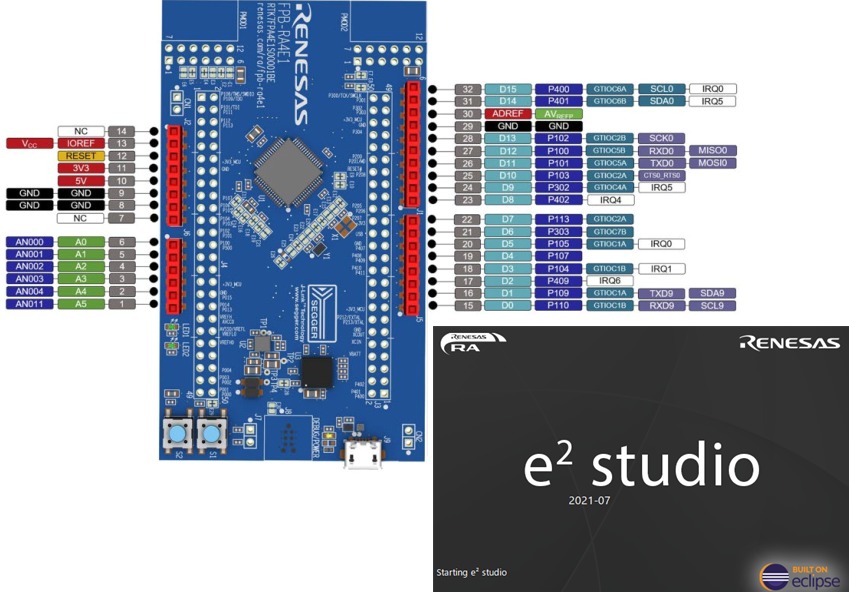
RA4E1 Fast Prototype Board(FPB)の使い方
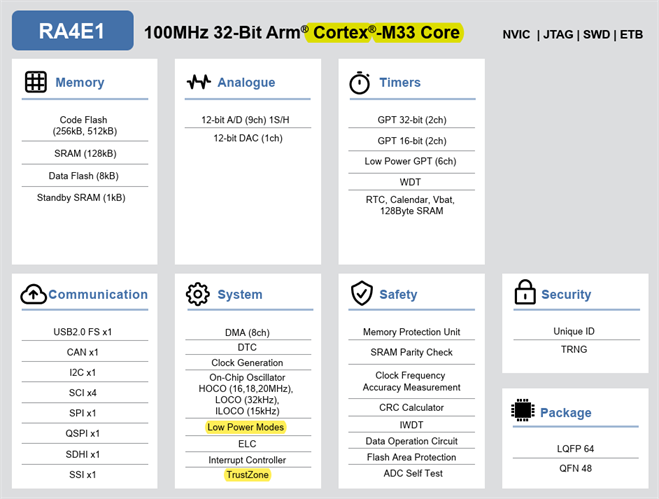
IoT MCUの機能と消費電力を最適化したRAファミリのRA4E1グループ評価ボード:RA4E1 Fast Prototype Board(FPB)の特徴は、以下2点です。
- TrustZone
- 低電力動作(Sleep > Snooze > Software Standby > Deep Software Standby)
TrustZoneの使い方は、RAファミリビギナーズガイドの11章が参考になります。
FreeRTOS利用を含むサンプルコードはコチラ、低電力動作サンプルコードはコチラからダウンロードできます。前章のquickstart_fpb_ra4e1_epやsci_uart_fpb_ra4e1_epプロジェクトは、初めのサンプルコード内にあります。
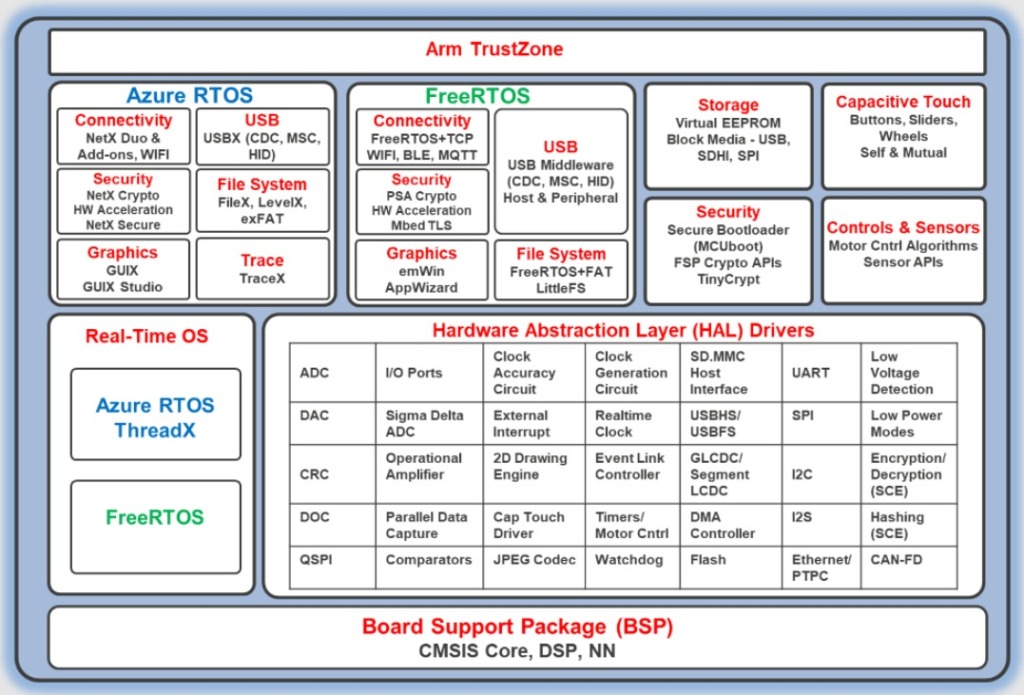
RTOSは、IoT接続先クラウドに応じてFreeRTOSかAzure RTOSの2種から選択可能です。また、通常の低電力動作:Sleepに加え、SnoozeやDeep Software Standbyなど超低電力動作モードも備えています。
プロジェクトは、ベアメタルまたはRTOS、TrustZone利用または非利用、の各選択肢がありますので4種類、FreeRTOSかAzureの選択を加えると、合計6種類の新規プロジェクト作成方法が可能です。
つまり、IoT MCUエッジ開発で必要となる様々なプロジェクト開発に、FPBだけで対応可能です。応用範囲の広い評価ボードで、IoTプロトタイプ開発に適しています。サンプルコード内容も豊富です。
まとめ
ユーザ視点からのベンダ各社がEclipse IDEをベースIDEに使うメリットは、IDEインタフェースがEclipseに似てくるので、ベンダが変わっても同じIDE操作性が得られることです。各社IDEで異なる部分は、周辺回路設定やAPI/コード自動生成の部分に限られるのが一般的です。
これら部分に加え、RAファミリ開発に使うe2 studioとFlexible Software Package は、無償コンパイラ選択、生成APIのソース追加方法、hal_entry.cなど、一般的なEclipseベースIDE利用者にとって?が生じる箇所が多数ありました。
ルネサス資料は多いのですが、肝心の?ポイントが解りにくいとも感じました。RAファミリ開発着手時は、これらに対し慣れが必要かもしれません。そこで、備忘録として本稿を作成しました。
なお、同じく前稿で示したREファミリについては、非常に良くまとまったREマイコンの使い方がルネサスサイトより入手できます。
RA4E1 Fast Prototype Board(Cortex-M33/100MHz、Flash/512KB、RAM/128KB)は、低価格で入手性もよくTrustZoneやRTOS、低電力動作など、幅広い知識や技術が要求されるIoT MCU開発の素材として優れています。
現状RAファミリ資料の纏まりは、REファミリと比べると今一歩ですが、改善されると思います。開発に必要となる技術レベルが少し高いのですが、e2 studioとFlexible Software Package (FSP)、RA4E1 Fast Prototype Board(FPB)と豊富なサンプルコードを使ったIoT MCU開発は、好奇心を満たすIoT MCU習得へ向けたお勧めの開発環境と評価ボードと言えるでしょう。
弊社ブログは、RA/REテンプレート開発を目指し、継続して関連情報を投稿します。
Windows 11アップグレード可能通知:FYI
10月5日リリースWindows 11アップグレード可能通知が弊社PCへ届きました。今月リリースWindows 10 21H2で運用し、1年程度の11評価結果を見てアップグレードを予定しております。ご参考まで。