

各タスクが独立=バラバラで動作する場合には、第2回に示したスケジューラーのRunningの切り替えのみでもRTOSを使ったマルチタスクとしては十分機能します。実際、LPCXpresso付属のfreertos_blinkyサンプルソフトを理解するには、第2回までの説明で十分です。
しかし、あるタスクの結果を待って別タスクが動作するような場合には、結果の待ちや通知、タスク間の同期が必要です。今回は、RTOSがどのようにこれらタスク間のデータ通知、同期を行っているかを解説します。
これらの技術を習得すれば、殆ど(7割以上)のソフト開発をFreeRTOSでカバーできるようになります。つまり、ここがRTOS習得の山場と言っても良いでしょう。少し量が多いのですが、ご勘弁を…。
初めに、状態遷移図のSuspendedによるタスク間の待ちや同期を行う仕組みを説明し、次に具体的な方法を説明します。
Suspendedの役目
第2回で示した状態遷移図のSuspendedが、タスクの待ちを実現します。
タスクAとタスクB間の通知や同期には、タスク実行中に別タスクの結果を待つことが必要となります。タスクAに待ちが発生した時は、vTaskSuspened()のAPIを使ってSuspendedへ移行し、タスクBの結果を受け取ると、RTOSがvTaskResume()のAPIを使ってタスクAをReadyへ戻します。Suspended中も第2回で示したBlocked同様、MCU能力を消費しませんので、待ち期間中も他のタスクがRunningすることができます。
以上がSuspendedによるタスクの待ちや同期を行う仕組みの簡単な説明です。Blockedと似ていることが解ると思います。違いは、BlockedがRunningからのみ遷移するのに対し、どの状態からでもSuspendedへ遷移できる点です。次にRTOSでの具体的な方法を示します。
FreeRTOSのタスク間データ通信、同期、排他制御の方法
RTOSを使わない通常ソフトの場合は、ユーザが定義するメモリ経由で、変数や結果の通知をユーザ自身が行います。また、割込みにより同期が可能です。弊社マイコンテンプレートもこの方法を使っています。
FreeRTOSを使うソフト開発の場合は、
タスク間のデータ通信は、 Queues:キュー、
タスク間の同期は、 Semaphore:セマフォ、
タスク間の排他制御は、 Mutex(=mutual exclusion):ミューティックス、
を使います。
Queues:キューによるタスク間データ通信
FreeRTOSは、Operating SystemですのでMCU資源のユーザによる直接アクセスを嫌います。メモリなどの直接表現ではなく、論理的にメモリを繋げたQueues:キューという手段で、通信という方法によりタスク間データ送受信を行います。FreeRTOSのタスク間通信Queues:キューは、FIFO:First In First Outとして使います。
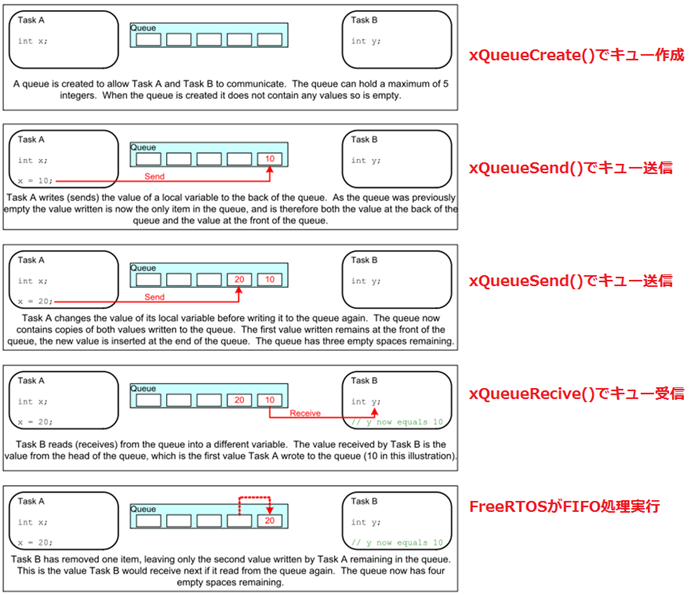
タスクAからタスクBへキュー経由でデータ通信する例です。受信タスクBは、xQueueReceive()でキューからのデータを受信します。このキューにデータが無い時のみSuspendedへ移行します。Suspended中は、キューデータ有無をRTOSが監視し、データが生じた時はタスクBのxQueueReceive()以降の処理が実行されます。
つまりタスクBは、xQueseReceive()の記述のみでデータ受信処理が実現できます。データ有無による待ち制御は全てRTOS側で行いますので、タスクBは受信処理のみの簡単記述ができます。
キューにより送受信タスクの処理は完全に分離されますが、処理結果のデータは、FIFOなので順序が保たれて通信されます。
Semaphore:セマフォによる同期
FreeRTOSのSemaphore:セマフォは、バイナリセマフォです。割込みによる同期を図示します。
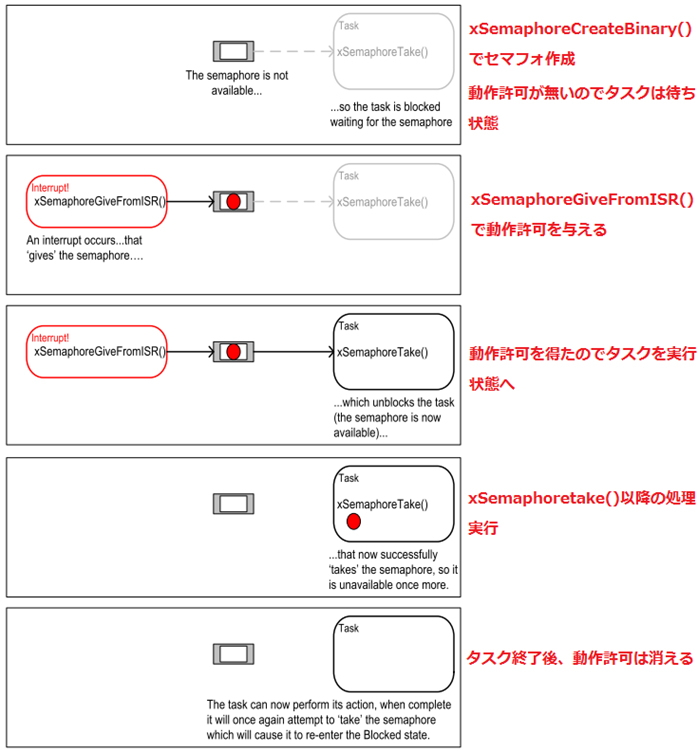
割込み処理は、割込みハンドラーと割込みサービスルーティン:ISRの2つで構成します。割込み発生時、優先順位に応じてMCUハードウエアが自動的にCallするのが割込みハンドラー、実際の割込み処理を記述する部分がISRです。※図では、Interrupt!がハンドラー、TaskがISRです。
FreeRTOSの割込み同期は、ISRで割込み発生をxSemaphoreTake()で待ちます。割込み発生時、ハンドラーで割込みフラグクリアなどの処理後、xSemaphoreGiveFromISR()で動作許可(図赤丸)を与えます。この動作許可によりISRのxSemaphoreTake()以降の割り込み処理が実行されます。これが割込み同期の実現方法です。
ISR処理後、動作許可は消えます。再びハンドラーが動作許可を生成するまでISRはSuspendedになります。
Mutex:ミューティックスによる排他制御
FreeRTOSのMutex:ミューティックス排他制御を図示します。
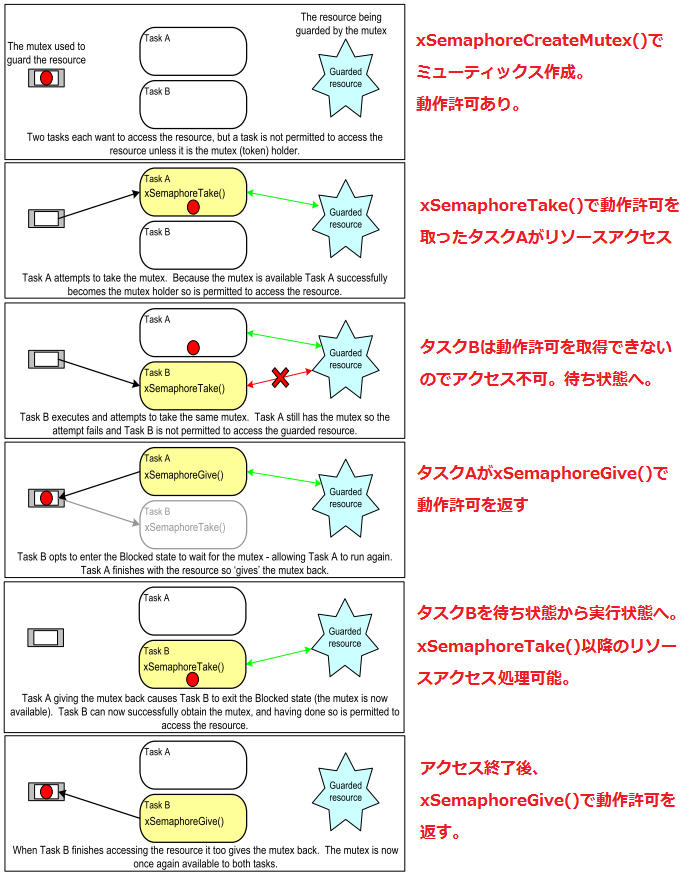
ミューティックスの場合は、セマフォと異なり初めから動作許可(図赤丸)があります。この動作許可を初めにTakeしたタスクAのみが共有リソースへアクセスできます。タスクAのアクセス中は、動作許可がないタスクBはxSemaphoreTake()でSuspendedになります。タスクAのアクセス終了後、動作許可をxSemaphoreGive()で放棄するので、今度はタスクBが共有リソースへアクセスできます。これが排他制御の実現方法です。
つまり、動作の許可を示すバイナリセマフォを同期で使う時はセマフォ、排他制御で使う時はミューティックスと呼ぶだけで、使用するAPIは、どちらもxSemaphoreGive()とxSemaphoreTake()です。
違いは、セマフォ同期のvSemaphoreCreateBinary()では、初期値:動作許可が無いこと、ミューティックス排他制御のxSemaphoreCreateMutex()では、初期値:動作許可が有ることです。
まとめ
FreeRTOSのタスク間データ通信、同期、排他制御の方法を示しました。これら待ちの制御は、スケジューラーのタスク管理Suspendedが重要な役割を果たします。
データ通信は、Queue:キュー作成後、このキューへタスクからデータSend/Receiveという通信で実現します。同期と排他制御は、Semaphore:セマフォ作成後、このセマフォへタスクから動作許可Give/Takeにより実現します。
タスク側の記述は、データのキューSend/Receive、セマフォの動作許可Give/Takeという単純なFreeRTOSのAPIのみで良く、関係タスクの状況に応じて即Runningにするか、あるいはSuspended→Ready→Runningにするかの面倒な制御は、全てRTOS側が行います。従って、ユーザタスクは、必要処理の簡単記述ができます。
今回登場したFreeRTOSのAPIが以下です。
キューデータ通信: xQueueCreate()、xQueueSend()、xQueueReceive()
セマフォ同期: xSemaphoreCreateBinary()、xSemaphoreGiveFromISR()、xSemaphoreTake()
ミューティックス排他制御:xSemaphoreCreateMutex()、xSemaphoreGive()、xSemaphoreTake()
上記と、第2回で示したFreeRTOSのAPIとを加えても20個弱のAPIでFreeRTOSが使えます。これらのAPIとFreeRTOSスケジューラーを理解していれば、FreeRTOS以外でも慌てずにRTOSソフト開発に着手できると思います。
最終回の次回は、ソースコード+評価ボードの開発環境に勝る解説書はない、という話をする予定です。