
IoT通信規格のBLE 4.2とThread(802.15.4)両方をサポートするNXP)Kinetis KW41Z搭載の評価ボードを使ったBEL4.2とThreadメッシュ接続の開発Video(タイトルが以下Lesson 1~10)を紹介します。
BLEやThreadソフト開発者必見のLessons
内容、質ともに優れたVideoでMCUXpressoとSDKの使い方も良く解ります。特に興味深い内容とその出所が以下です。
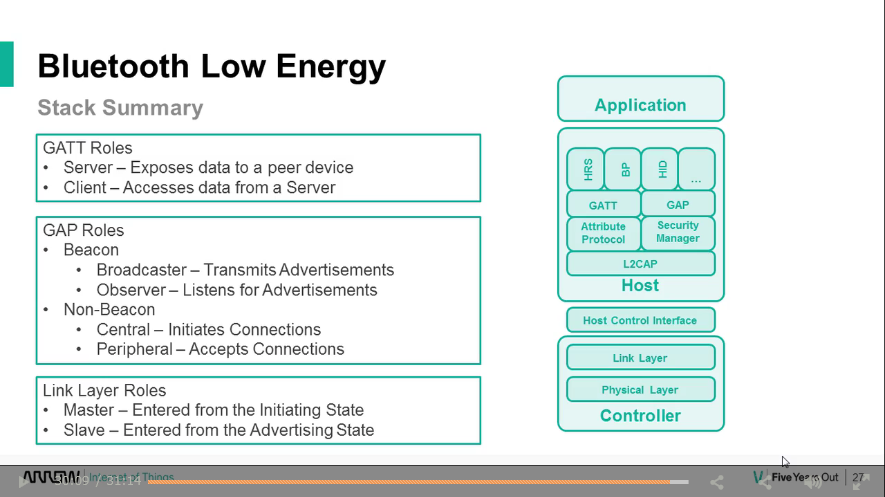
- Bluetooth ClassicとBluetooth Low Energyの本質的な違い(Lesson 3、3分ごろ)
- Bluetooth ClassicとBLE間を接続するBluetooth Smart Ready(Lesson 3、6分ごろ)
- BLE接続の具体例(Lesson 3、19分ごろ)
- BLE/Thread接続に必要な知識(Lesson 3, 6)
- Threadが生まれた背景(Lesson 6、2分ごろ)
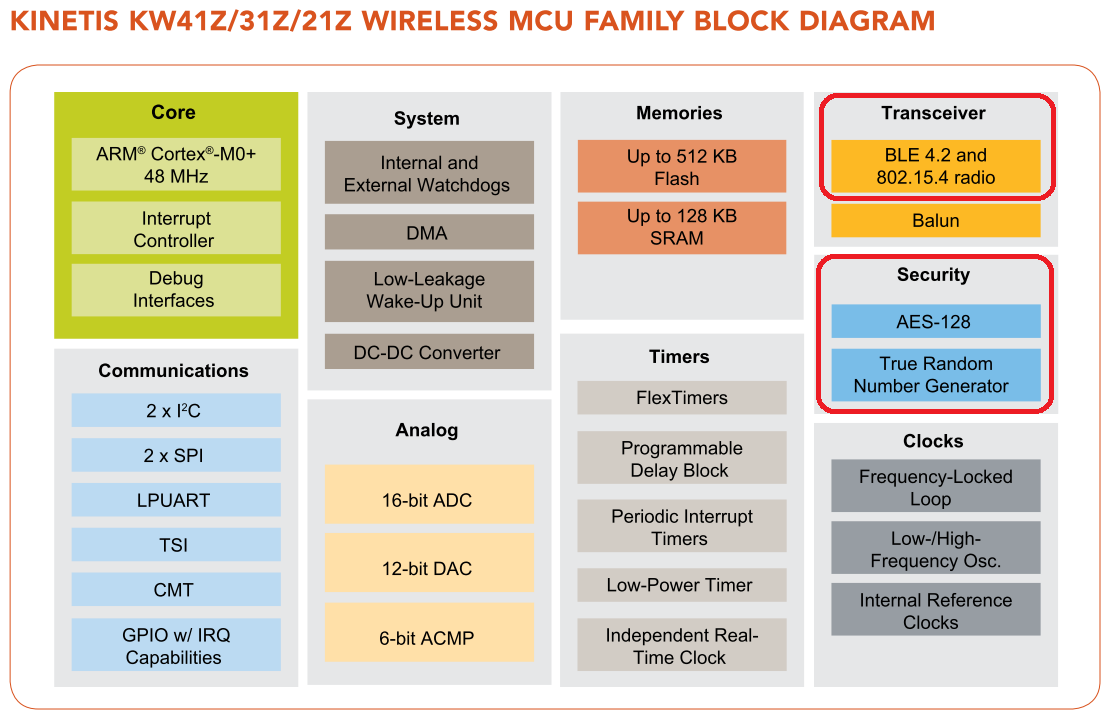
- Cortex-M0+/48MHz、512MB ROM、128KB RAM、FreeRTOSで実現するBLE/Thread IoT端末(Lesson 5, 9, 10)
BLEやThreadに関する情報は多くありますが、ソフト開発者の立場からは、本Lessonsが最も要領よくポイントをまとめています。
Kinetis KW41Z
Kinetis KW41Zの評価ボードは、以下の2種(Digi-Key価格)です。
- Rigado製R41Z-EVAL $59.94
- NXP製FRDM-KW41Z $145.00
低価格で有名なFRDM評価ボードですが、さすがに両プロトコル対応のKW41Z搭載ボードとなると$100以上します。Videoで使っているR41Z-EVALは、約$60と安く入手できます。但し、Lesson 10のBLEとThreadメッシュ切り替え接続の動作確認を行うには、同時に3台の評価ボードが必要です。
ThreadのみサポートのKW21、BLEのみのKW31もありますが、無線規格が乱立していて、どれが本命かを見極めるのが困難な現状では、両プロトコルサポートのKW41が安全でしょう。
API for IoT
MCUXpressoとSDKを使って、BLEまたはThread通信機能を持つIoT端末を開発する際に、プロトコルのどの部分の変更/修正が必要で、それがソース上のどこにあるか、全体の開発手順などはVideoを観ると良く解ります。
また、LEDなどのGPIO制御を行うSDKデモソフトとIoT通信の並列処理は、FreeRTOSを使って実現していることも解ります。簡単なIoT端末なら、このデモソフトに、外部センサ値をAD変換し、その変換データをクラウドのサーバーへIoT経由で送信する機能を追加しさえすれば、直ぐに開発できそうです。
※簡単なIoT端末は後述
BLEやThreadは、IoT通信の有力な候補です。しかし、IoTの通信プロトコルが何になるにせよ、IoT通信向けのAPIが決まれば、あまり気にする必要がない、というのが全Lessonを通しての私の感想です。
その理由は、デモソフト実装済みのGPIO制御はそのまま使えますし、FreeRTOSを使っていますので、外部センサ入力を定期的にADCする処理(ADCスレッド)と、ADC変換データをIoT通信APIへ出力する処理(IoT出力スレッド)の2処理を追加開発すれば良いからです。
ADCスレッドは、IoT通信規格には無関係です。一方、IoT出力スレッドは、Uart出力と同様のIoT APIが使える(用意される)と思います。NXP)LPC8xxマイコンのUart APIの例で示すと、Chip_UART_SendBlocking()が、Chip_IoT_SendBlocking()に代わるイメージです。IoT API利用条件が初期設定で満たされれば、ユーザは、通信速度や、通信プロトコルを意識せずにIoT通信を使えるようになると思います。
* * *
IoT通信規格が不確定な状況で、少しでも早くIoTやRTOSに慣れるには、R41Z-EVALは良い評価ボードです。また、FreeRTOSを使えば、48MHz動作のCortex-M0+、512MB ROM、128KB RAMで簡単なIoT端末が開発できそうな見通しもこれらLessonは、与えてくれました。是非、ご自分でご覧になってください。
簡単なIoT端末のイメージ
データ入力とGPIO出力を行うMCU端末で、IoT無線通信機能を備える。通信セキュリティを確保できるAES-128などの機能も備え、対象機器から取得したデータを安全にクラウド内のサーバーへ送信する。
サーバーは、対象機器データを人工知能を使って予測分析し、結果を端末へ送信する。
端末は、受信結果を基にLEDなどのGPIO出力を行い、オペレータまたはロボットが対象機器メンテナンス作業の手助けをする。