



マイコンテンプレートを利用するコツ/Tipsの第2回目はテンプレートの「マルチタスク処理の実現方法」を示します。
組込OSの分割起動
シングルコアのマイコンで、マルチタスク処理の実現方法が、「処理の分割起動」です。
組込OSは、この分割処理=タスクの起動をOSが行います。FreeRTOSの“USING THE FREERTOS REAL TIME KERNEL”から抜粋したFigure 4は、このことを解り易く示しています。
OSのKernelは、tick interrupt毎にタスク切り替えを行います。t2でTask1は「強制的に中断」され、Task2へ切り替わります。t3では、Task2が強制中断され、Task1が「中断処理から再開」されます。

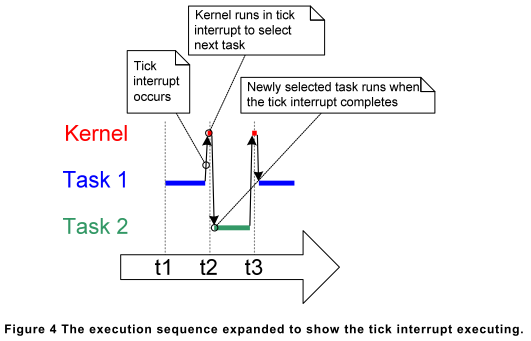
ある時刻で動作する処理は、Kernelを含めて1個ですが、tick interrupt毎に処理を切り替えてマルチタスク処理を実現します。
テンプレートの分割起動
分割起動は、テンプレートでも同じです。テンプレートは、第1回目で説明した「細かく分割した処理」をtick interrupt毎に時分割で起動します。組込OSとの差は、(簡単に説明すると)起動処理を強制的に中断したり、再開したりする機能が無いことです。

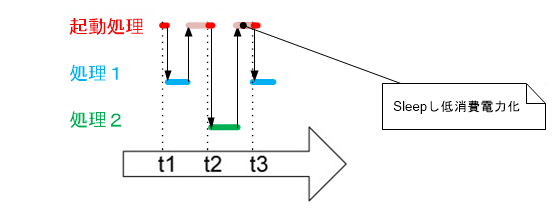
起動処理1の中断機能が無いので、t2のタイミングまでに「処理1が終了」していることが必要になります。
処理終了のための分割
この「処理終了」は、どうすれば得られるのでしょうか?
第1回説明の「細かい処理の分割」は、結果として処理時間も短くなり、この処理終了をもたらします。

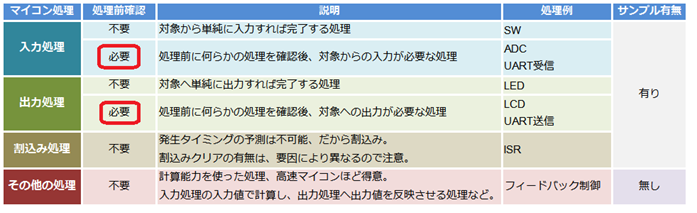
注意すべきは、赤丸の処理の完了確認が必要な入出力処理です。しかし、ここを「完了確認の処理」と、「その結果で動作する処理」の2つに分けて開発すれば、問題解決です。それぞれの処理が短時間で終了するからです。
同じように割込み処理も、基本的にISR: Interrupt Service Routine内では、「割込み発生確認と割込み要因のクリア」のみを行い、「割込みの結果で動作する処理は別処理」として分割して処理化します。
このような処理分割により、デバッグが容易となり、別アプリへ流用/応用性、部品化も高まります。
勿論、サンプルプログラムのISR処理を「そのまま流用」してもテンプレートへ組込んでもOKです。サンプルプログラムが提供する典型的なISRは、処理時間が短い場合が殆どでだからです。
分割起動後の処理
起動処理で起動される側の処理時間が短くなると、起動処理へ戻る時間が増えます(上図ピンク)。この戻った時の処理が、無限ループの処理です。
テンプレートでは、無限ループ内で起動する処理は、低電力処理のSleep(またはDeep Sleep)です。
この結果、高速マイコンであればある程この「無限ループ:空き時間」が長くなり、マイコン消費電力の大部分を占めるコア動作を停止するSleepを効果的に使えます。
ポイントのまとめ
- 処理時間を短くするため、「確認処理」と「その結果の処理」を分離
- 起動処理無しの「空き時間」は、低消費電力処理を起動(SleepとDeep Sleepの差には注意)
次回予告
テンプレートが処理を分割し、これを分割起動するマルチタスク処理の実現方法を示し、処理分割のコツ/Tipsを示しました。次回は、「時分割のタイミング」について説明する予定です。