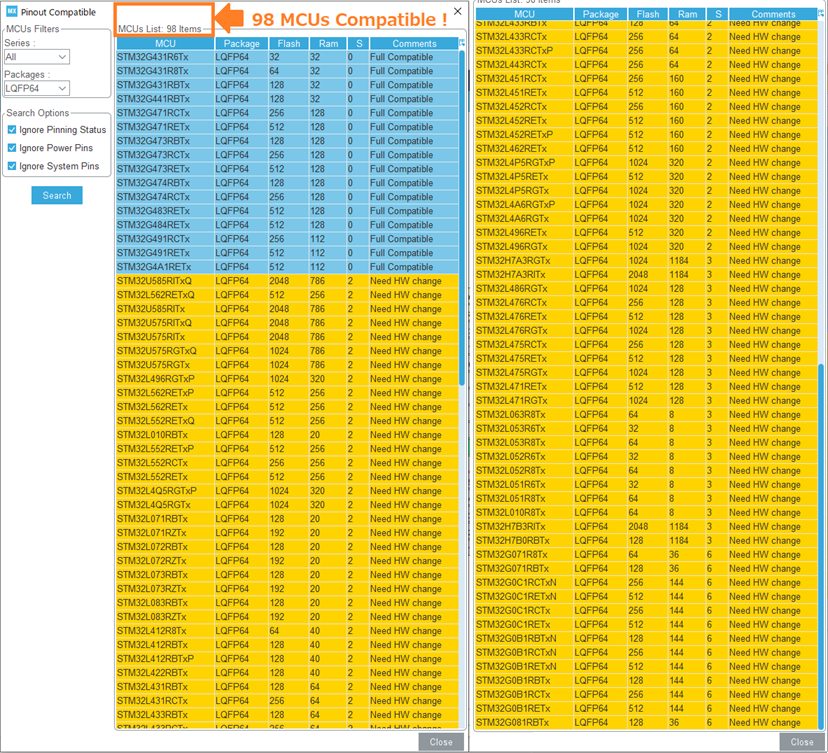
2022年4月20日、STマイクロエレクトロニクス(以下ST)は、Azure RTOS開発ツールを拡充し、より幅広いSTM32MCU対応を発表しました。拡充したSTM32MCUリストが下記です。
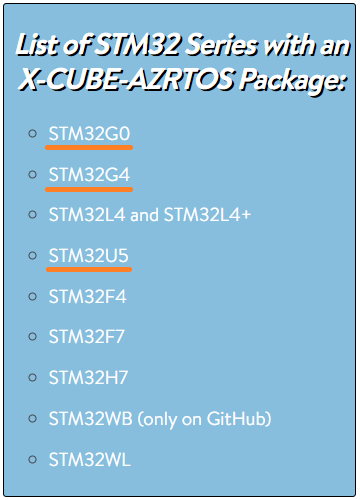
弊社販売中STM32G0xテンプレートで使ったSTM32G0や、テンプレート開発中のSTM32G4も、Azure RTOS開発が容易になりました。
CMSIS RTOSからAzure RTOSへ
今回の発表前までは、販売中のNXP版FreeRTOSアプリケーションテンプレートに続き、STM32G4を使ってST版“CMSIS-RTOS”アプリケーションテンプレートを構想していました。
しかし、今回のAzure RTOS開発ツール充実発表を受け、“CMSIS-RTOS”から“Azure RTOS”対応へ変更することにしました。STのAzure RTOSサンプルコードが活用でき、また、Microsoft公式Azure RTOS情報もあるからです。
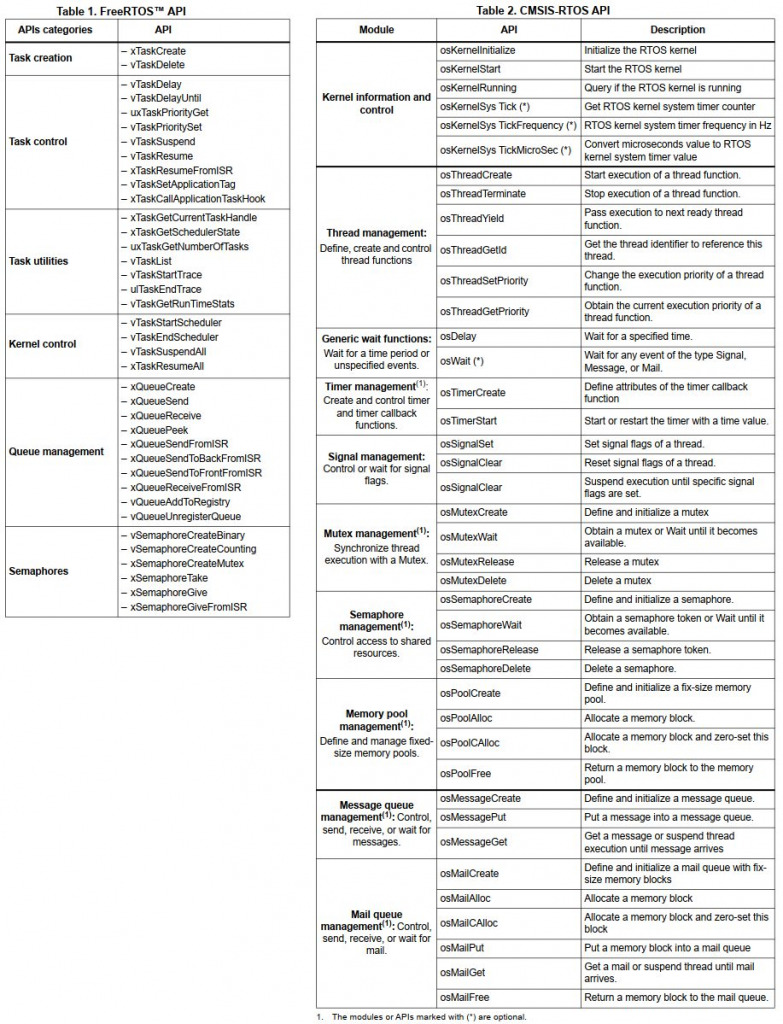
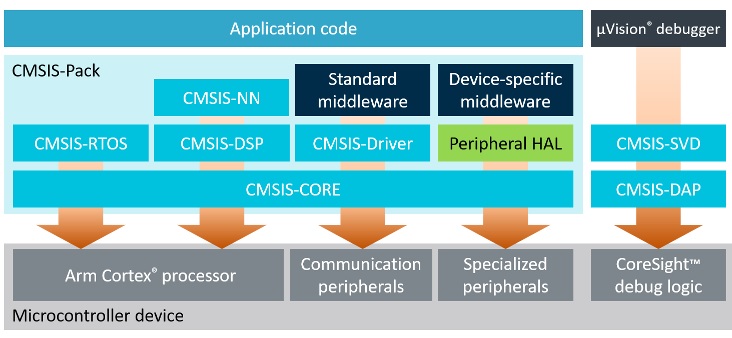
※ARM社規定のCMSIS RTOSは、FreeRTOSやAzure RTOSをラップ(wrapper)するRTOSです。同じCMSIS RTOS APIでFreeRTOSまたはAzure RTOSが使え、開発アプリケーション流用性は高まります。但し、ラップ関数分のオーバーヘッドが生じます。詳しくは、構想投稿の4章を参照してください。
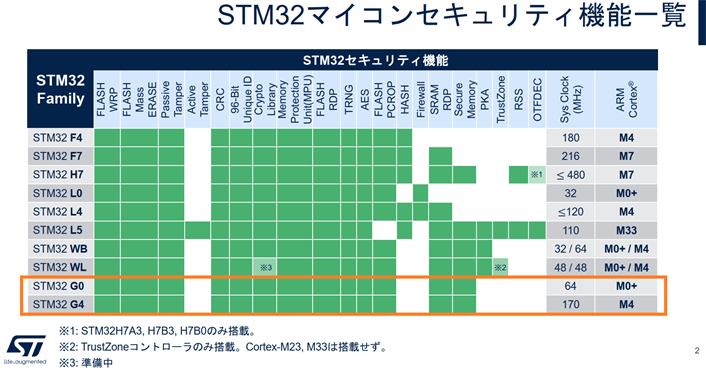
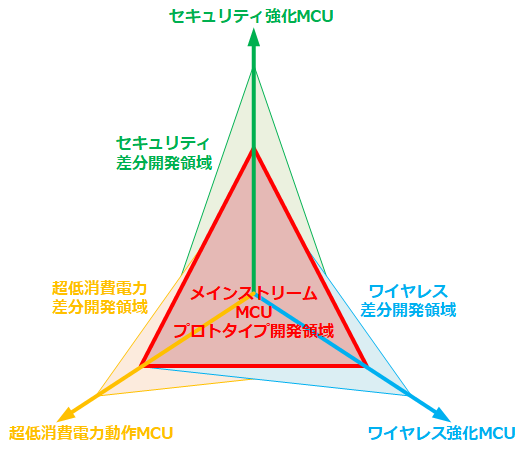
STがAzure RTOS開発ツールMCUを拡充した背景は、Microsoft Azureクラウド接続IoT MCUの急増だと思います。リストアップした9種のSTM32MCUが、IoT MCU有力候補と言えます。
Azure RTOS開発ツールインストール方法
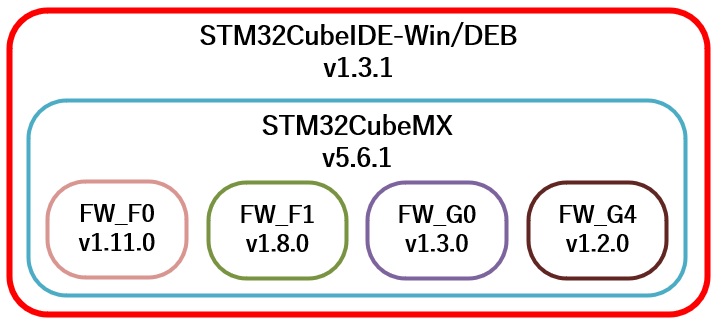
STM32G4を例に、Azure RTOS開発ツールインストール方法を示します。現在のSTM32G4開発ツールが、下記版数です。
・STM32CubeIDE v1.9.0 (以下CubeIDE)
・STM32CubeMX v6.5.0 (以下CubeMX)
・STM32Cube FW_G4 v1.5.0 (以下FW_G4)
・X_CUBE_AZRTOS_G4 v1.0.0 (以下AZRTOS_G4)
X-CUBE-AZRTOS-G4が、今回発表したSTM32G4のAzure RTOS開発ツールです。
FreeRTOSは、CubeMXのMiddlewareに実装済みです。一方、Azure RTOS は、ExpansionsパッケージのAZRTOS_G4によりCubeMXへ機能追加します。Expansionsパッケージ追加のため、少し手間がかかります。
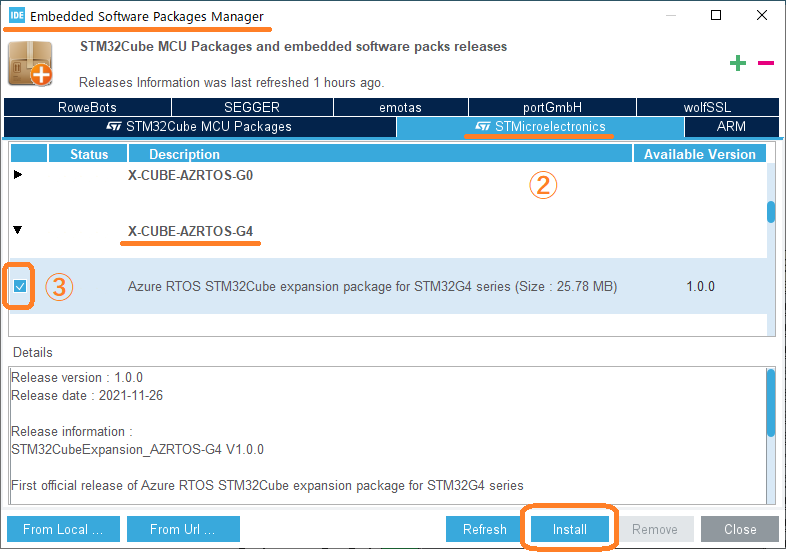
① CubeIDEのHelp>Manage Embedded Software Packagesクリック
② Embedded Software Packages ManagerのSTMicroelectronicsタブ選択
③ X_CUBE_AZRTOS_G4のAvailable Version 1.0.0を選択し、Installクリック
AZRTOS_G4インストール後、使用コンポーネントの選択が必要です。
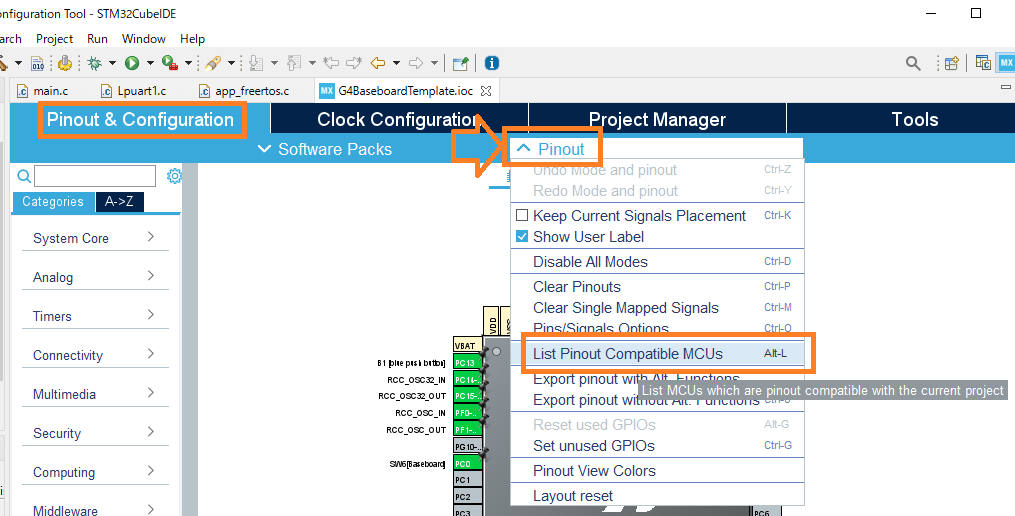
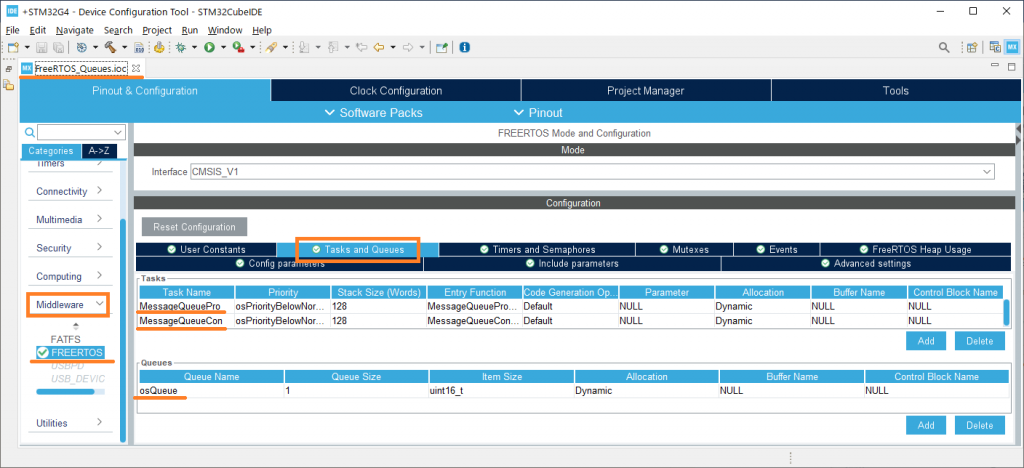
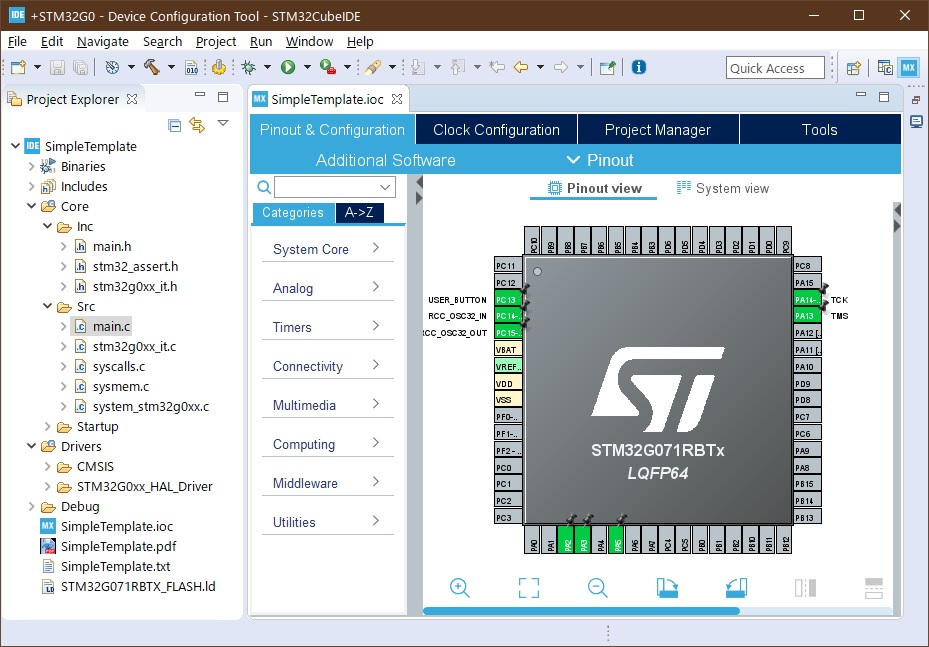
④ CubeMXのPinout & Configurationタブ内Software Packsをクリック
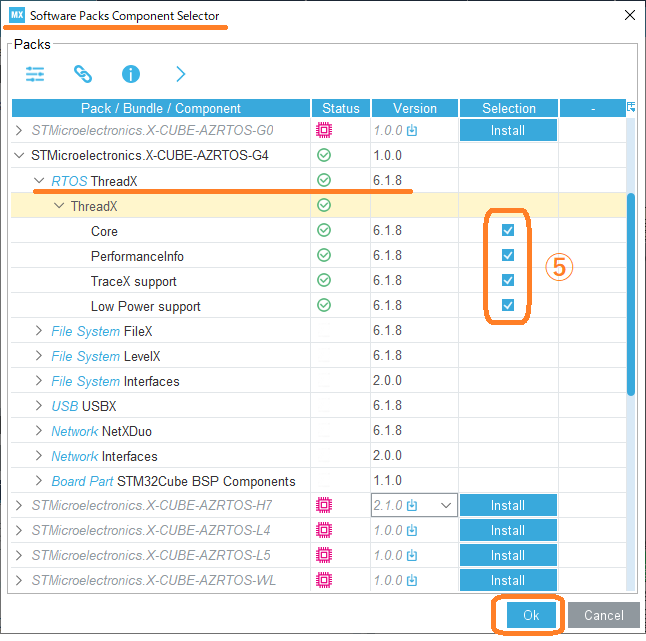
⑤ Select Components(Alt+O)を開き、Software Packs Component Selectorで追加Azure RTOSコンポーネント:RTOS ThreadX/File system FileX/USB LevelX…などを選択し、OKクリック
STM32G4評価ボード:NUCLEO-G474REを使う場合は、RTOS ThreadXを選択し、Core/Low Power supportを選択すれば十分です。但し、念のため、Performance InfoやTraceX supportも選択しておきます。
インストールしたAzure RTOS ThreadX版数が、6.1.8であることも判ります。
Azure RTOS ThreadXサンプルコードインポートと動作確認
インストールしたAZRTOS_G4が正常動作するかをAzure RTOS ThreadXサンプルコードと評価ボード:NUCLEO-G474REで確かめます。確認方法が下記です。
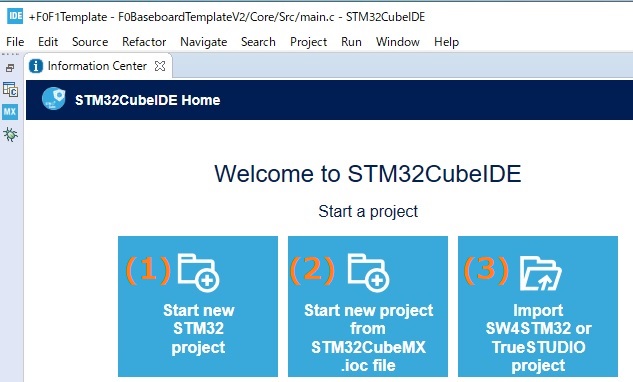
① CubeIDEのInformation CenterからImport STM32Cube exampleをクリック
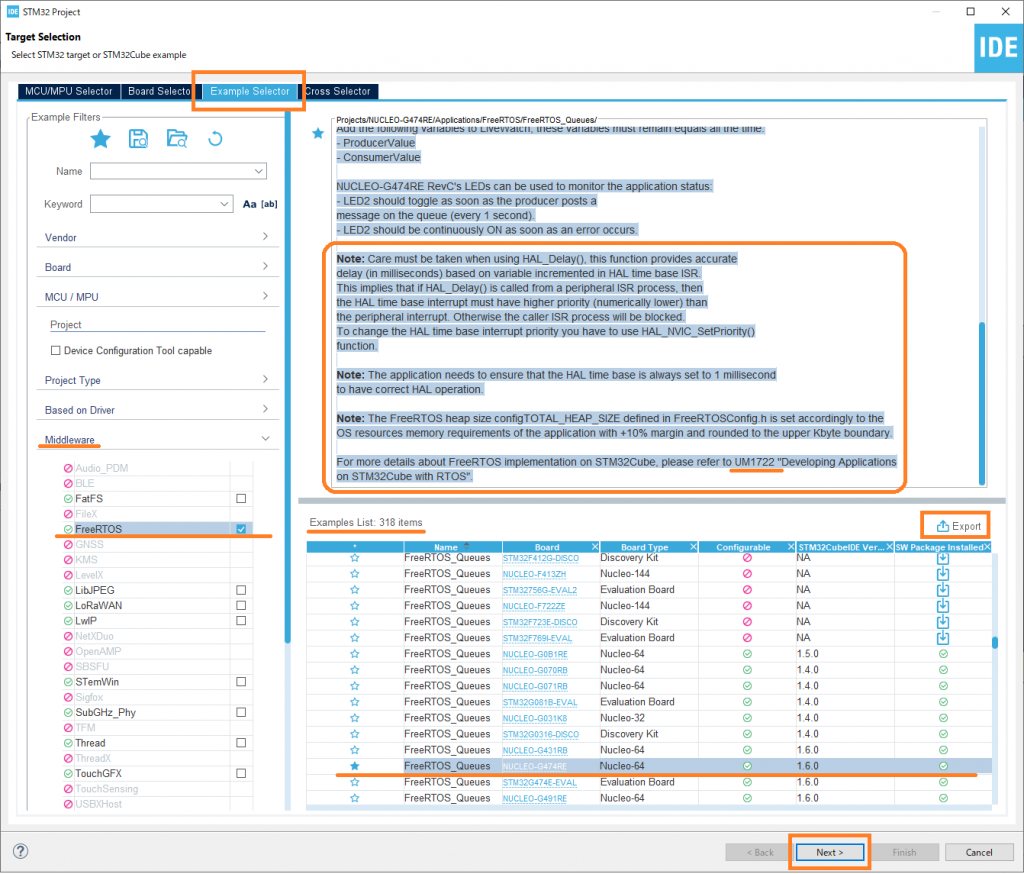
② STM32 Project from STM32Cube ExamplesのExample Selectorタブで、BoardのName:NUCLEO-G474RE、Middleware:ThreadXを選択
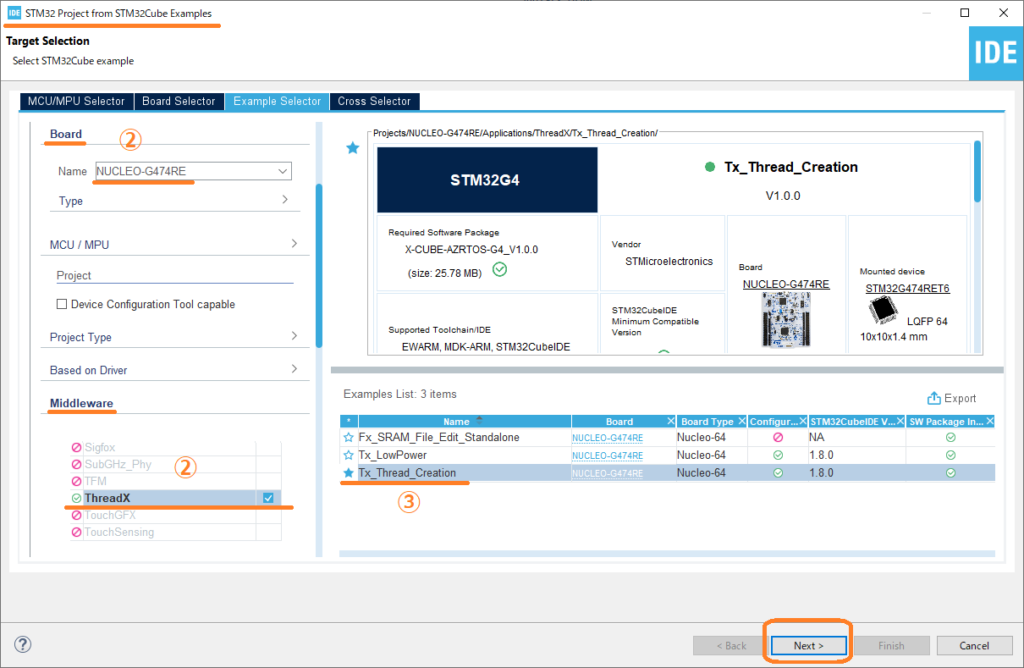
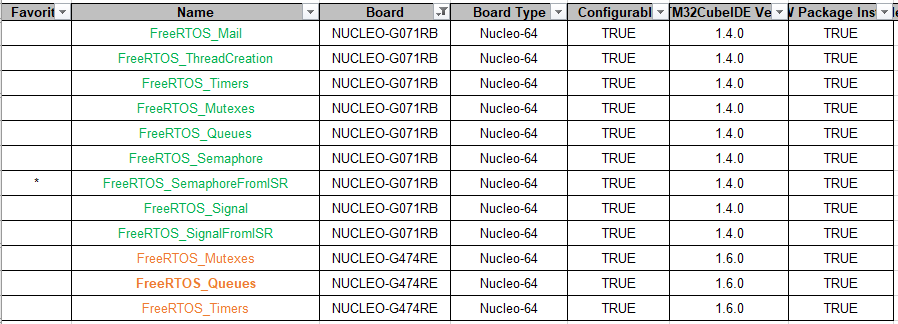
STM32G4 Azure RTOS ThreadXサンプルコードは、現在3個です。最も基本的な、
③ Tx_Thread_Creationを選択し、Finishクリック。CubeIDEへTx_ThreadX_Creationサンプルコードがインポート。
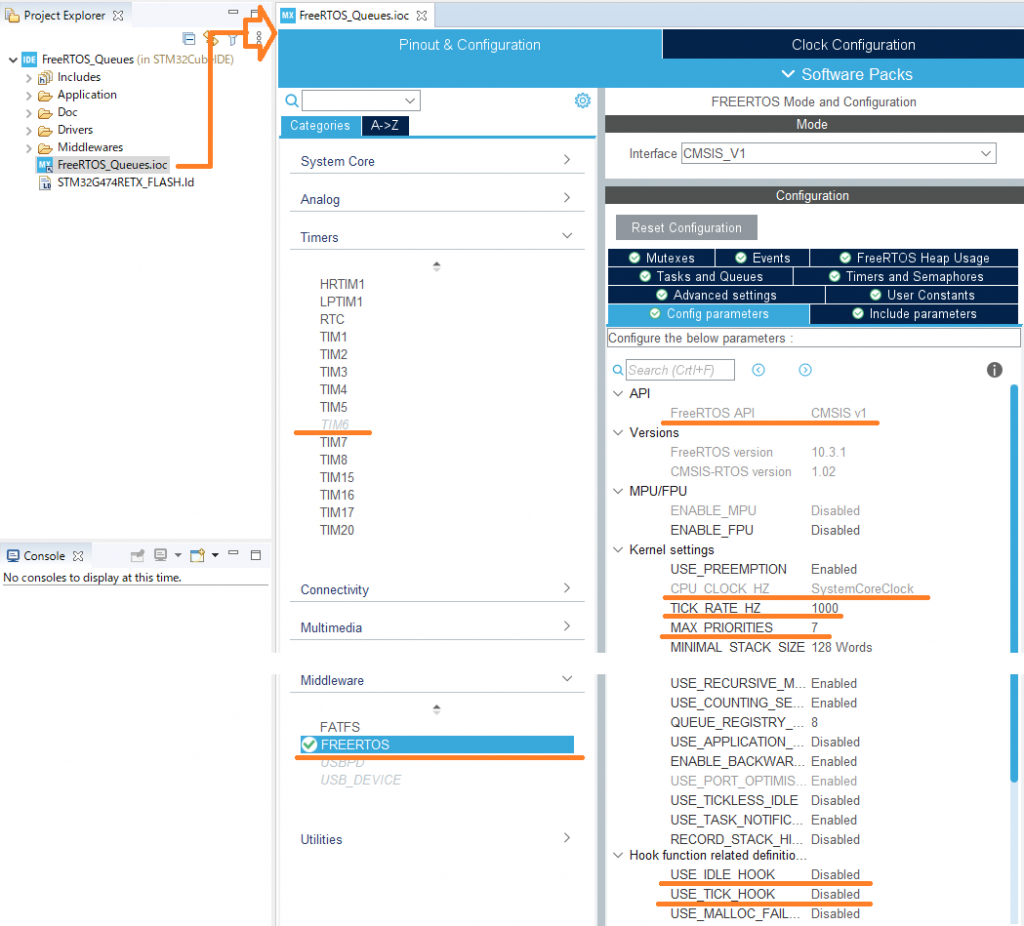
④ CubeIDEのTx_Thread_Creation.iocをクリックし、CubeMXで、Generate Code(Alt+K)を実行
⑤ CubeIDEでTx_Thread_Creationをビルドし、評価ボードへダウンロード
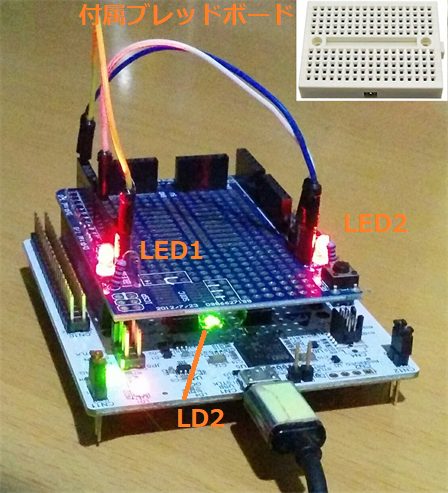
⑥ 評価ボードのLED2が、500ms点滅と200ms点滅を3回繰返し、その後1秒点滅に変わる
以上で、STM32G4 Azure RTOS開発ツールのX_CUBE_AZRTOS_G4インストールを、ThreadXサンプルコードで動作確認しました。
使用したTx_ThreadX_Creationサンプルコードの説明は、次週以降に行う予定です。直ぐ知りたい方は、Tx_ThreadX_Creationフォルダ内readme.htmlを参照してください。
まとめ
STが、STM32G0やSTM32G4、STM32U5などのIoT MCUに対し、Azure RTOS開発ツール拡充を発表しました。
STM32G4を例に、CubeMXへExpansionsパッケージのX_CUBE_AZRTOS_G4でAzure RTOS機能の追加方法、Azure RTOS ThreadXサンプルコードインポート、NUCLEO-G474REでThreadXサンプルコードの動作確認をしました。
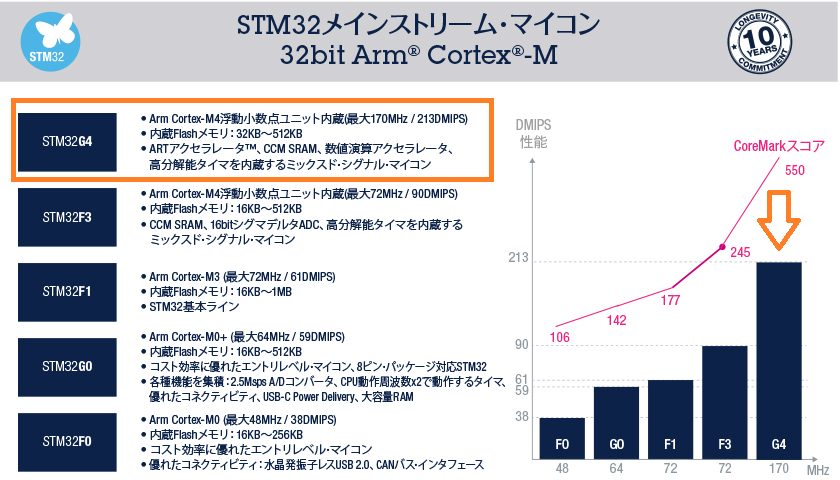
STM32G0(Cortex-M0+/64MHz)、STM32G4(Cortex-M4/170MHz)、STM32U5(Cortex-M33/160MHz)は、弊社IoT MCUテンプレートの開発対象です。
今回の発表を受け、STM32G4のRTOSを、CMSIS-RTOSからAzure RTOSへ変更し、ST版Azure RTOSアプリケーションテンプレート開発を計画中です。