現役STマイクロエレクトロニクスの「メーカエンジニアの立場」から記載された、ユーザ質問の多かった事項を中心にマイコンデータシートの見かたを解説する記事(連載3回目)の最終回を紹介します。
全3回の連載記事内容
第1回:凡例、絶対最大定格、一般動作条件、電源電圧立上り/立下り(2017年10月1日投稿済み)
第2回:消費電流、低消費電力モードからの復帰時間、発振回路特性(2017年10月29日投稿済み)
第3回:フラッシュメモリ特性、ラッチアップ/EMS/EMI/ESD、汎用IO、リセット回路(←今回の投稿)
マイコンデータシートの見かた
3回分割のマイコン個別機能データシートの見かた、最終回ではSPIとADCの記載データ見かたが当初予定に追加されました。SPIは、接続デバイスがASICやFPGAの場合の注意点、ADCは、アナログ回路なので消費電流が大きくなる点に注意すべきだと記載されています。
当然のことですがデータシートは、データ値の羅列です。従って、そのデータ値の意味と解釈の仕方は、例えば記事図9の赤囲みコメントで付記されたようにすべきです。しかし、普通は残念ながら赤囲みコメントは、データシートには付いていません。
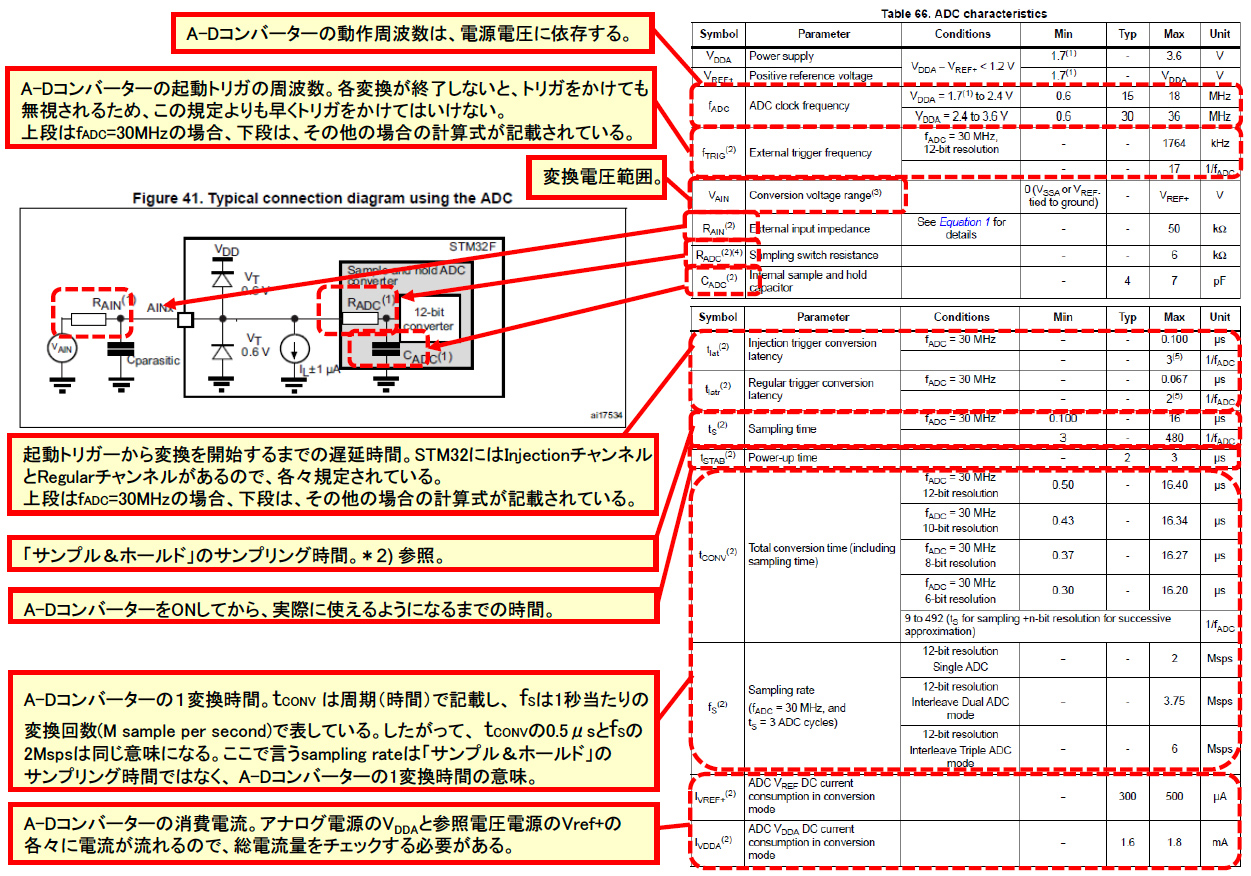
従って、この赤囲みコメントが自然に頭に浮かぶような勉強、半導体の基礎知識がマイコンを使うには必要で、その知識を背景にデータ値を読むことを記事は求めています。
連載3回範囲のデータシート見かたまとめ
- フラッシュメモリは、高温使用時、データ保持年数が短くなる。データシート記載値は、MCU内部書込み/消去時間であり、書込み開始~終了までの作業時間ではない。書き換えビットが増えると消費電流も増える。
- EMS/EMI/ESDは、MCUを実装した基板や使用環境に依存。データシート記載値は、MCU「単体の能力」。
- 汎用IOは、電源電圧を下げると端子駆動能力も下がり、立上り/立下り時間が長くなる。しかし、STM32MCUは、駆動能力をレジスタで設定できるので遅くなることを抑えることができる。
- MCUリセット回路設計時は、フィルタリング信号幅のグレーゾーンを避けることが必須。
- SPIは、接続デバイスがASICやFPGAの場合、十分なタイミングマージンが必要。
- ADCは、アナログ回路のバイアス電流のため消費電流が大きくなる。また電流変動で変換誤差が増える。
全て学んだ後の開発着手では遅い!
開発者に求められるのは、「開発したもの」です。
そして、多くの場合、短い期限付きです。問題は、この期限内で、なにがしかの結果、成果を出さなければ、開発者としてはNGなことです。しかし、成果を出すには勉強、知識も必要です。
初心者は、この勉強、知識の入力時間と、成果の出力時間の配分が上手くありません。ベテランになると知識も増えますが、入出力の時間配分が上手く、結局何らかの成果も生みます。特に開発者は、全行程の自己マネジメント(時間配分)にも注意を払う必要があります。
例を挙げると、夏休みの自由課題を何にし、休み中にどのように仕上げるか、です。もし提出物が無ければ、課題に取り組んでいないのと(殆ど)同じです。
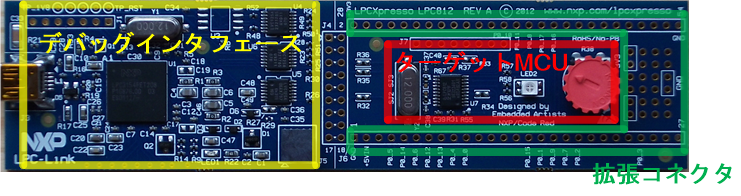
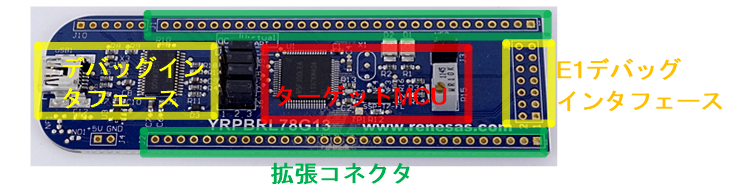
残業時間制約も厳しく、開発者にとっての作業環境は厳しくなる一方です。弊社マイコンテンプレートとMCUベンダ評価ボードとの組合せは、開発者が求められる出力を早期に生み出すツールになると思います。