扱うMCUデバイスの追加、WindowsやiOSなどのOS変更、Eclipseそのものの変更、バグ修正など様々な要因によりマイコン開発環境:IDEの更新は発生します。今回は、マイコンIDE更新について解説します。
更新通知と更新理由
マイコンアプリケーションソフト開発中ならば、リスクが増える可能性もあるIDE更新は避けたいものです。
このため「開発者が更新をするか否かを選択」できるのがマイコンIDEの特徴です。Windowsと大きく異なる点ですね。
更新判断には、「更新が発生」したか、「更新の理由」は何か、この2つを知る必要があります。この情報をIDEのWelcome画面のWebリンクで教えてくれるのがEclipseベースのIDEです。NXPのLPCXpressoの例を示します。
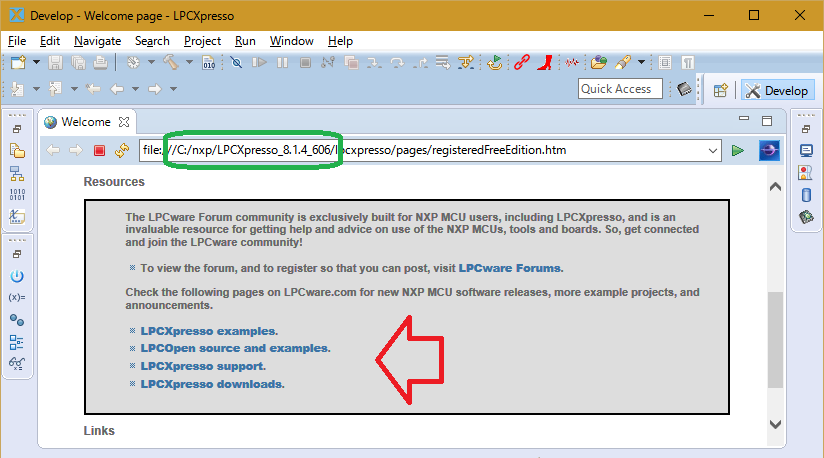
赤矢印のリンク先をみると、最新版IDEと、変更内容などが解ります。使用中のIDEと版数が異なる場合には、この内容を読んで更新判断ができます。新旧LPCXpressoは、緑囲いで示した版数毎に別フォルダへインストールされるので、IDE更新リスクがフォルダ内に閉じ込められるので安心です。
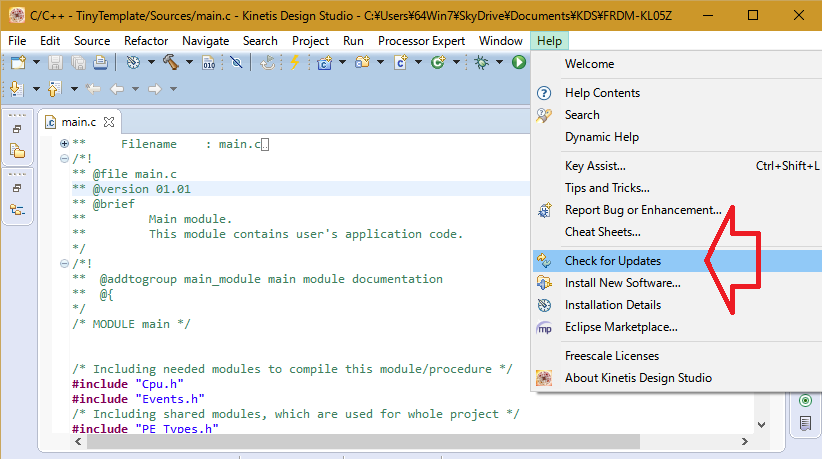
また、NXPに買収された旧FreescaleのKinetis Design Studio: KDSの例が下図です。Welcome画面に加え、Help>Check for Updatesで更新確認と新版インストールまでバックグラウンドで可能です。この機能は、LPCXpressoにはありません。
但し、私の環境では、ベースとなるEclipseのメジャー更新が関係しているのかもしれませんが、KDS V3.1からV3.2への更新ができませんでした。V3.2更新は、別途インストーラで可能です。やはりIDE更新確認ツールがあっても、時々サイトでIDEの最新版確認は、必要だと思いました。
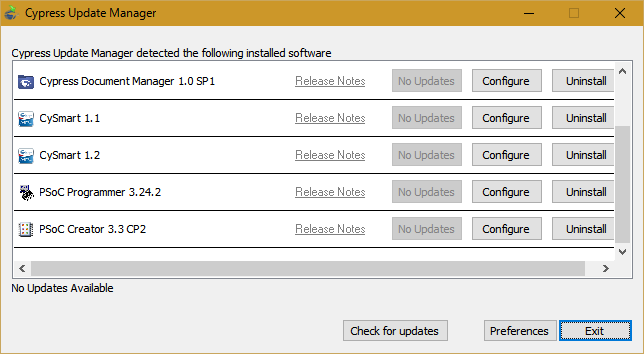
また、CypressのPSoC Creatorは、Update Managerツールで更新確認とインストールができます。旧版はアーカイブ保存されるので、万一最新版にトラブルが発生しても安心です。
以上3社のマイコンIDEは、どれもEclipseベースのIDEですが、更新方法や旧版の扱いは各社異なります。
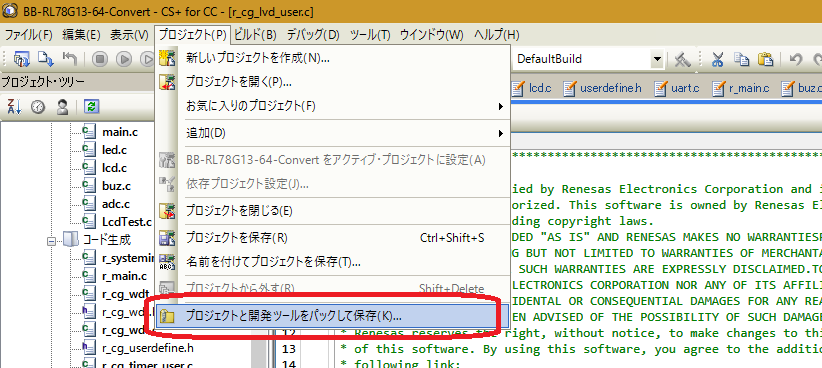
一方、ルネサス独自仕様のIDE:CS+もアップデート・マネジャーツールで更新します。独自仕様なので、細かい更新内容確認や、一部選択更新なども可能です。ツール・ニュースなどで更新、バグ情報を知らせてくれるのも役立ちます。
また、更新前に、「開発ツールをパックして保存(K)…」を実行すると、更新トラブル対策も可能です。
マイコンIDE更新を安全にするには
マイコンIDEの更新トラブル回避には、OS起因でない場合は、旧版のIDEへ戻せることが必要です。また、Eclipseのメジャー更新時などは、操作方法が変わることもあるので注意が必要です。
開発案件のキリが良い時期に更新するのが安全策でしょう。
マイコンIDE開発経験を活かすには
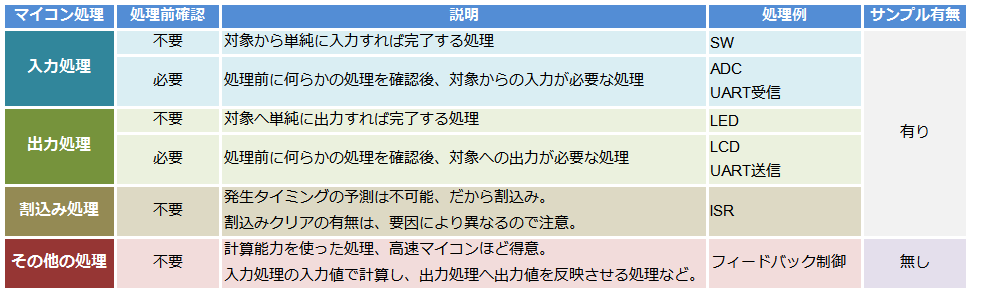
弊社マイコンテンプレートで使用中の各社IDE特徴を示します。マイコンIDEは、Eclipseベースに集約されつつあるようです。今回は、同じベースでもIDEの更新方法が異なることを示しました。
これは、EclipseベースのIDEを使う時に覚えておくと役立つのが、各社共通のエディタやデバッグなどのコア機能であることを暗示しています。他社IDE使用時に、この経験が活かせるからです。

マイコンIDE習得のコツやTipsは、コチラのページにもまとめています。参考にしてください。