ARMコア制御の入門マイコンとして適しているNXP LPC1114/5マイコンのテンプレートを改版しました。
このLPC111xテンプレートV2 は、従来テンプレートの必須機能のみを実装したTiny(小さな)テンプレートの適用、最新開発環境MCUXpresso IDE(v10.1.1_606)での動作確認が改版目的です。
近日中に旧LPC111xテンプレートご購入者様で、無料アップグレード対象者様には、お知らせとLPC111xテンプレートV2の無償配布を行います。暫くお待ちください。
LPC1114とLPC1115の違い NXP LPC111xテンプレートの対象マイコンは、ARM Cortex-M0コア50MHz動作のLPC1114(ROM/RAM=32KB/8KB)とLPC1115(ROM/RAM=64KB/8KB)です。
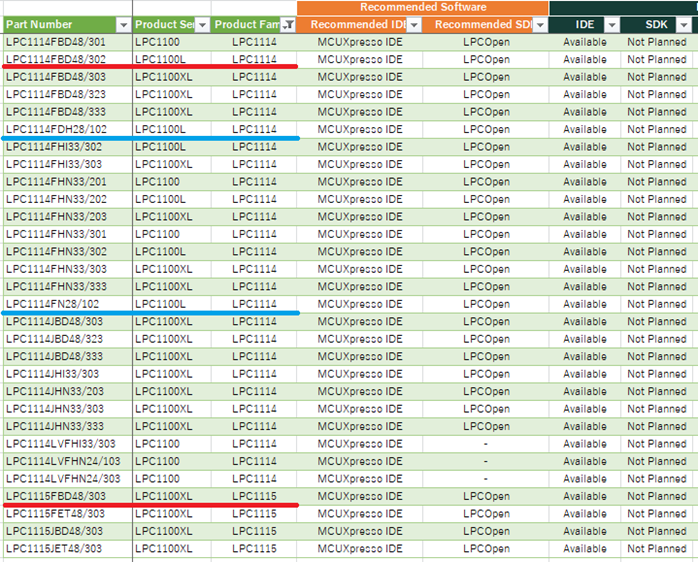
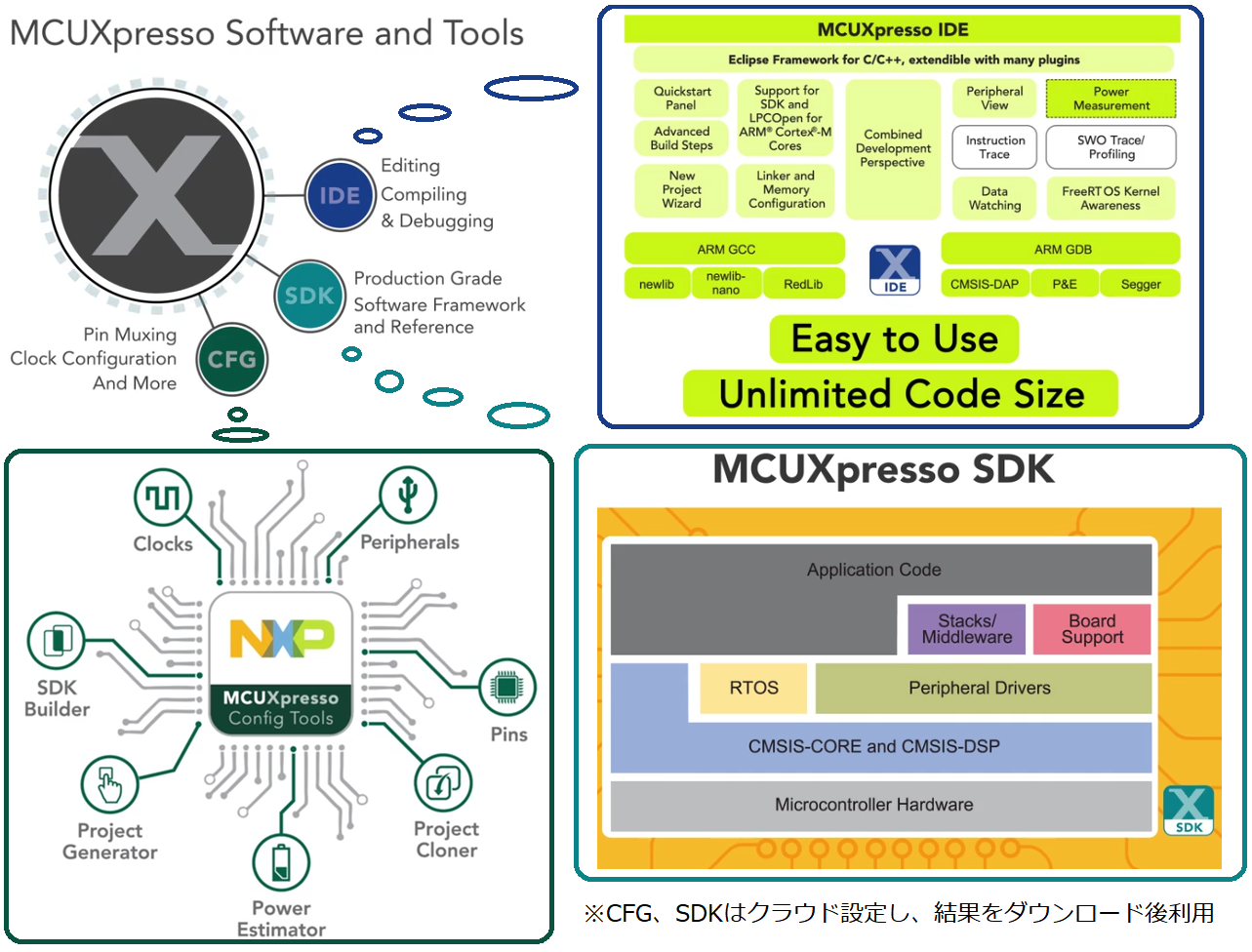
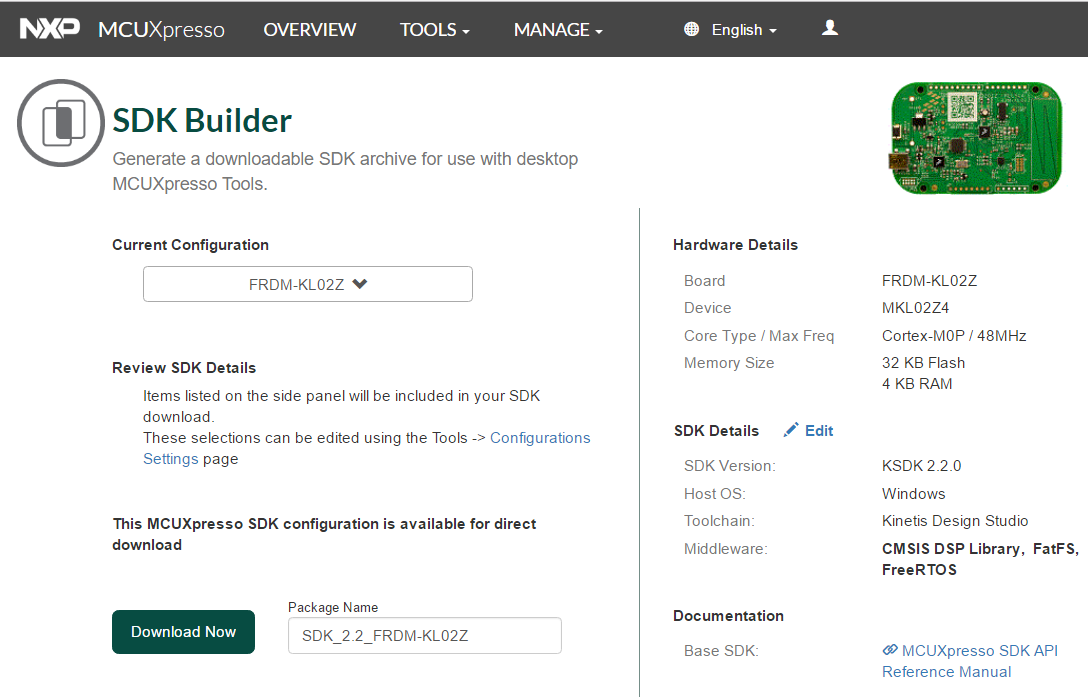
以前の投稿で紹介したNXPマイコンの推薦開発環境 をLPC1114/5でフィルタしたものが下図です。
LPC1114 and LPC1115 Recommended Software ※赤線は、評価ボード搭載マイコン、青線は、単体購入可能マイコン
NXPのLPC1100シリーズは、LPC1110/11/12/13/14/15の6種の型番と、同じ型番でも低消費電力の技術進化によりLPC1100/1100L/1100XLの3つの世代があるので複雑です(通常→L→XLでより低消費電力)。
但し本ブログは、個人でも入手性が良く低価格、良い評価ボードもあるマイコンが対象です。このふるいにかけると、フィルタの下線を付けたLPC1114/302、消費電力LPC1100L搭載のNXP評価ボードLPCXpresso1114 (秋月電子2000円)、デバイス単体では、DIP28ピンパッケージLPC1114/102、消費電力LPC1100L (400円)とSOP28ピンパッケージLPC1114/102、消費電力LPC1100L (190円)の3種類がそれぞれ秋月電子より購入できるので対象となります。
LPC1115は、LPC1114のROMを2倍の64KBにし、電力消費を第3世代に進化させたマイコンです。NXP評価ボードのLPCXpresso1115 には、LPC1115/303、消費電力LPC1100XLが搭載されています。
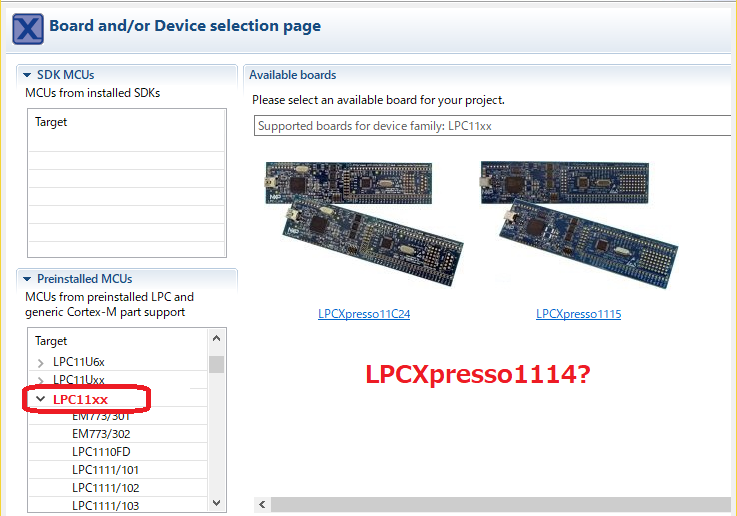
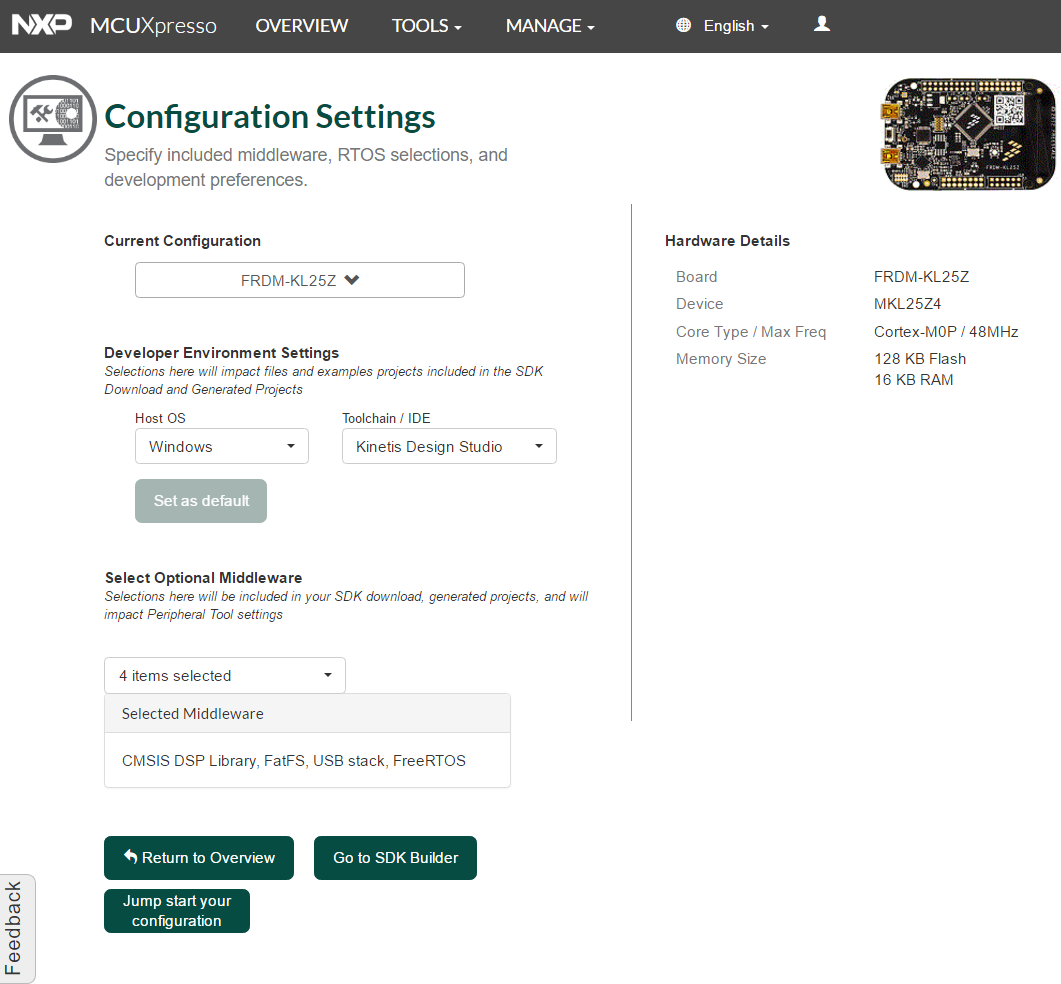
LPCXpresso1115の入手性はあまり良くありません。しかし、開発環境MCUXpresso IDEでAvailable boardsに現れる評価ボードはLPCXpresso1115とLPCXpresso11C24のみで、LPCXpresso1114はありません。
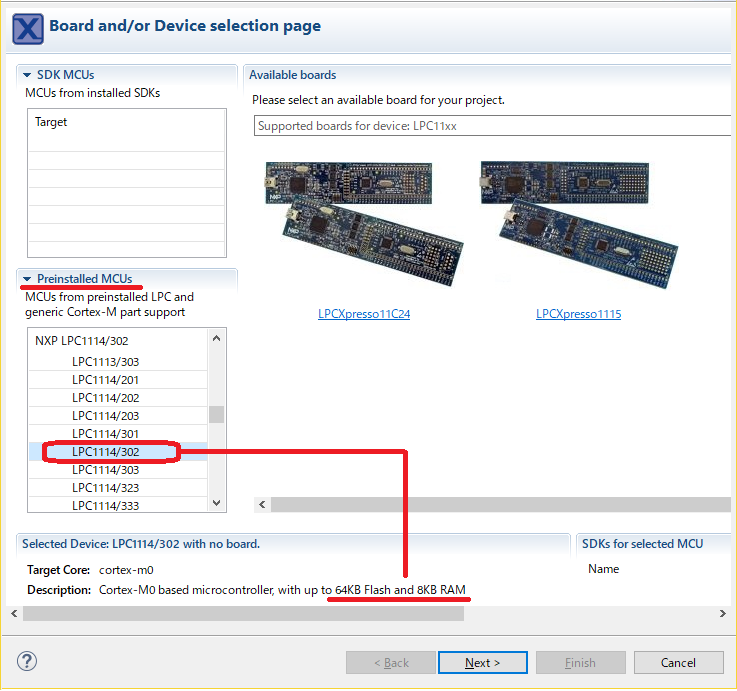
MCUXpresso IDE Available Boards 従って、入手性が良いLPCXpresso1114評価ボードで新プロジェクトを作るには、評価ボードからでなく、Preinstalled MCUsからLPC1114/302を選択する必要があります。
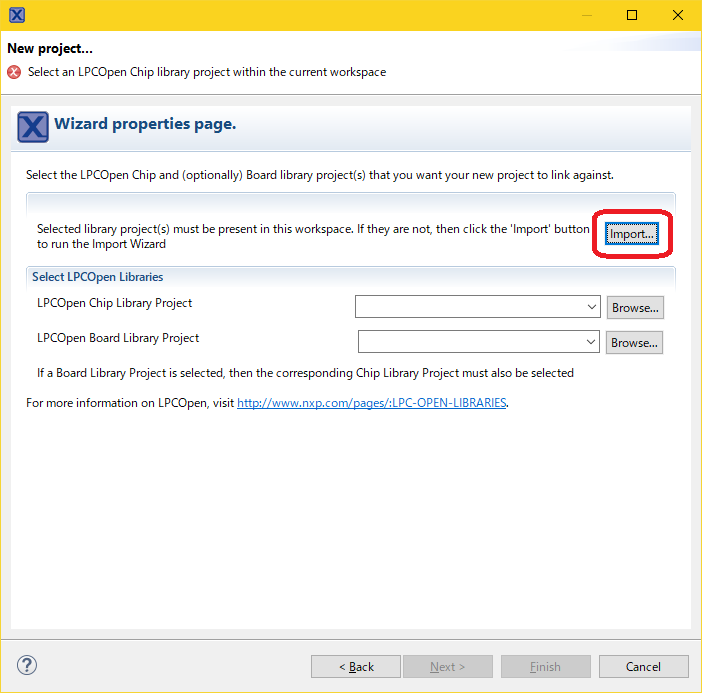
LPCXpresso1114のMCUXpresso新規プロジェクト作成方法 Select LPC1114/302 Preinstalled MCUsから評価ボード搭載のLPC1114/302選択後>Next>LPCOpen – C Project>Project name追記と進み、Import…をクリックします。
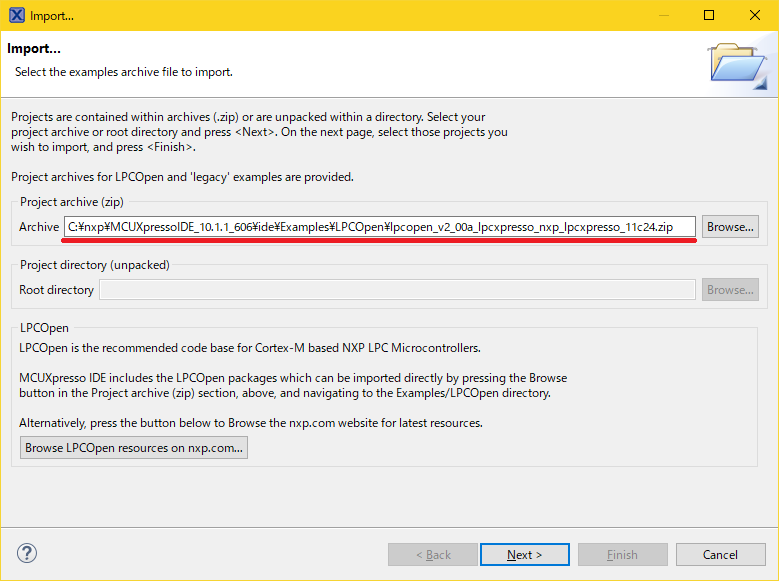
Click Import… ArchiveでLPCOpenからlpcopen_v2_00a_lpcxpresso_nxp_lpcxpresso_11c24.zipを選択しNextをクリックします。
Import lpcopen_v2_00a_lpcxpresso_nxp_lpcxpresso_11c24.zip 使用ライブラリにlpc_chip_11cxx_libとnxp_lpcxpresso_11c24_board_libを選択後、ダイアログに従っていけば評価ボードLPCXpresso1114/302上に新プロジェクトが作成できます。
LPCXpresso1114とLPCXpresso1115評価ボードの回路図は全く同じです。違いは、搭載ターゲットマイコンのみでIO割付も同じ、PLC-Linkと呼ぶ評価ボード付属デバッガも同じです。またImportして使用するライブラリも同じです。
ならば、Available boards のLPCXpresso1115を選択して新プロジェクトを作成し、LPC1114評価ボードへダウンロードも可能だと思われるかもしれません。しかし、これはデバッガ接続時にエラーが発生します。
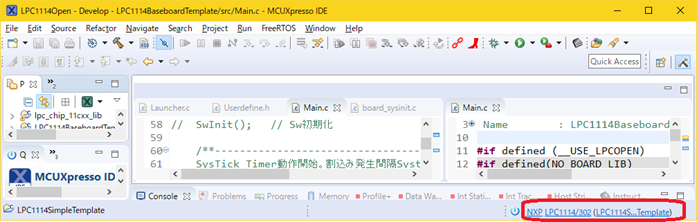
MCUXpressoの右下にターゲットマイコンNXP LPC1114/302が示されており、これ以外へはデバッガ接続ができない仕組みになっています。
Target NXP LPC1114/302 このため、同一ソースコード、使用ライブラリも同じであっても、ターゲット毎にプロジェクト作成が必要です。逆に、LPC1114評価ボードで動作確認したソースコードでライブラリも同じなら、ターゲットさえ変えれば、LPC1115評価ボードでも動作すると言えます。違いは、ROM容量のみだからです。
評価ボード搭載のLPC1115/303とLPC1114/302の機能差はROM容量以外にもありますが、LPC111xテンプレートの応用例は、この差が生じる機能は使用しておりません。
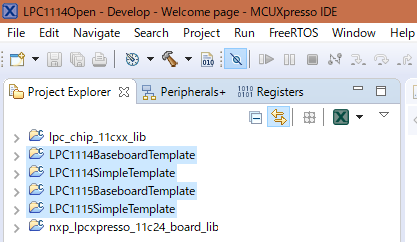
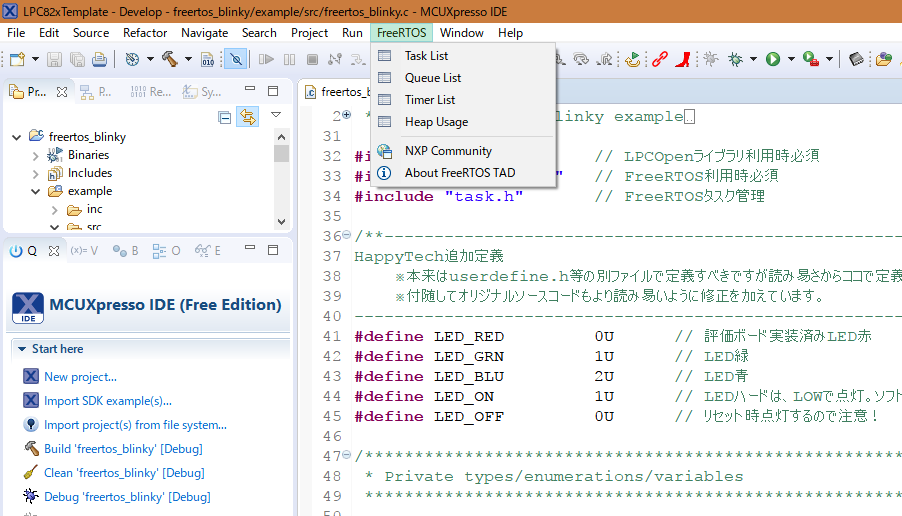
従って、テンプレート応用例のシンプルテンプレート/Baseboardテンプレートを、LPC1114評価ボード、LPC1115評価ボードそれぞれに提供します。LPC111xテンプレートProject Explorerの様子が下図です。
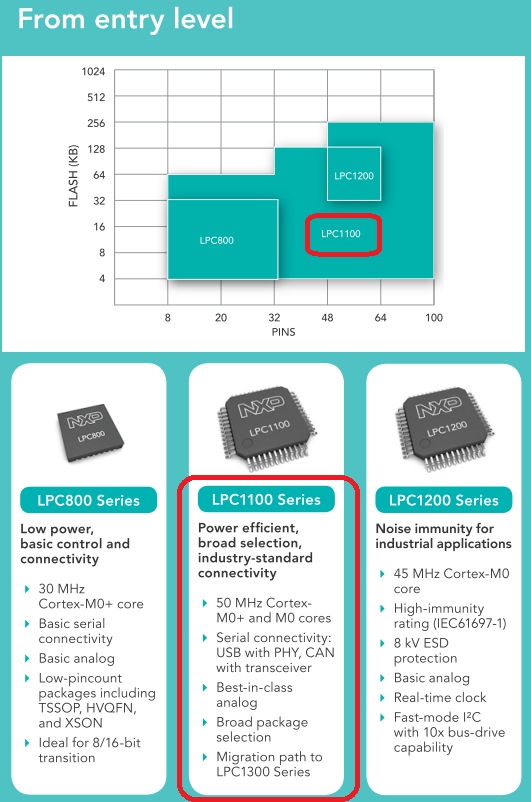
LPC111xTemplate Project Explorer LPC1100シリーズの位置づけと開発環境の良さ NXP ARMコアエントリレベルのLPCマイコンラインナップを、LPC Cortex-M microcontrollers — Discover the difference より抜粋しました。
LPC1100 Series (Source:LPC Cortex-M microcontrollers — Discover the difference) LPC1100シリーズは、最も基本的で適用範囲も広いCortex-M0コアマイコンです。電力効率は、LPC800シリーズのCortex-M0+に及びませんが、低電力技術の進化でCortex-M0+に近い低電力動作も可能です。Cortex-M0とM0+の機能差は、コチラの投稿 も参照してください。
また、LPCOpenライブラリもLPC8xxに比べ安定(≒バグ無し)しています。DIPやSOPパッケージの入手が容易で低価格、手実装も可能です。LPCXpresso1114/5評価ボードとLPC111xテンプレートを使えば、ARM Cortex-M0マイコンの早期習得とプロトタイピング開発ができると思います。
評価ボードの半分は、切り離して単体デバッガとしても使えます。デバッガとターゲットの接続は、ARMコア標準のSWDインタフェースなので、LPCマイコン以外の他社ARMコアにも使うことができます。100mAまでの電力供給と、実質4本の接続でデバッグとオブジェクトダウンロードが可能です。
LPC111xテンプレートV2のまとめ 改版したNXP LPC111xマイコンテンプレートV2構成を示します。
テンプレート名 対象マイコン(ベンダ/コア) テンプレート応用例 評価ボード:動作確認ハードウェア
LPC111xテンプレートV2(LPCOpen v2.00a利用) LPC1114(NXP/Cortex-M0)
・シンプルテンプレート
LPCXpresso1114(LPC1114/302)
LPC1115(NXP/Cortex-M0)
・シンプルテンプレート
LPCXpresso1115(LPC1115/303)
ARM Cortex-M0コアのLPC1114/302(ROM/RAM=32KB/8KB)実装のLPCXpresso1114評価ボードは、低価格で入手性良く、開発環境MCUXpressoも他社EclipseベースIDEと比べ使い勝手良く、ライブラリも安定しています。また、評価ボードとBaseboard を接続すれば、色々な周辺回路制御も手軽に学べます。
今回の改版でテンプレート本体は、より解り易く、利用し易くなりました。テンプレートを使うと、複数のサンプルソフトをそのまま流用した並列処理が簡単に実現できます。
テンプレートの特徴や仕様は、LPC111xテンプレートサイト を、使い方などはサイトのテンプレート関連情報を参照してください。
ARMコア制御の入門用として適しているLPC111xテンプレートとLPC1114評価ボードは、Cortex-M0の習得、プロトタイピング開発のお勧めキットです。