IoT MCUは、従来の2×16文字のLCDから、SPIバス接続でよりリッチな表示ができるものへと変わりつつあると前投稿で述べました。
SPIバスは、従来MCUでも実装しています。ただし、多くの場合I2Cとポート共用で、センサやEEPROMとI2C接続するサンプルソフトが多数派でした。IoT MCUでは、センサ接続とリッチ表示を同時にサポートするので、I2C/SPIポートを2個以上装備するMCUが多くなりました。
本稿は、SPI/I2Cバスの特徴と、SPI接続の最新表示デバイスを示します。
SPIバスとI2Cバスの特徴
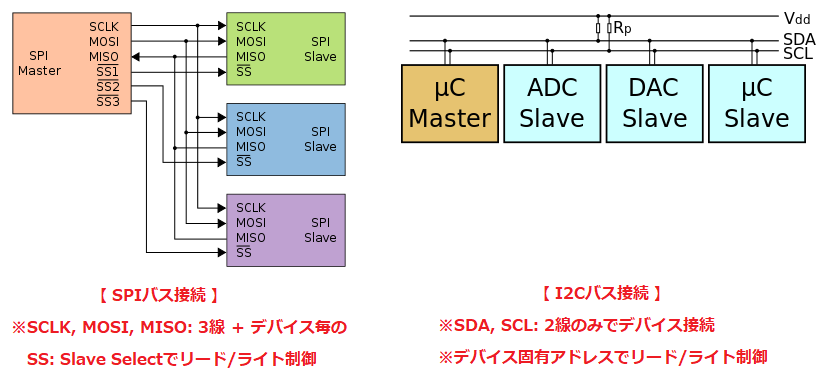
SPI(3線式)とI2C(2線式)は、どちらも制御ボード内で使うシリアル通信インタフェースです。少ない線数で複数デバイスを接続できますので、制御ピン数を少なくしたいMCUには適しています。
※SPI:Serial Peripheral Interface
※I2C:Inter-Integrated Circuit
仕様の解説などは、ネット内に数多くありますので省略します。
前投稿のNXP Swiss Army Knife Multi toolのWebinarで示されたSPIとI2Cの特徴に、MCU使用例を加筆したのが下表です。
| SPIバス | I2Cバス | |
| 長所 |
・高速 ・5V/3.3V デバイス混在可能 |
・2線でバス接続可能 |
| 短所 |
・デバイス毎にチップセレクト必要 ・4動作モードがあるためバス接続時面倒 |
・低速 ・同一Vddでデバイスプルアップ |
| 使用例 | リッチ液晶ディスプレイ, SD/MMCカードなど | EEPROM, 加速度センサ, 気圧センサなど |
※NXPは、当初I2Cバスで液晶ディスプレイ接続を試みたが、結局SPIバス接続になったそうです。Webinarだと、アプリケーションノートに記載されないこのような貴重な情報が入手できます。
SPI接続の最新表示デバイス
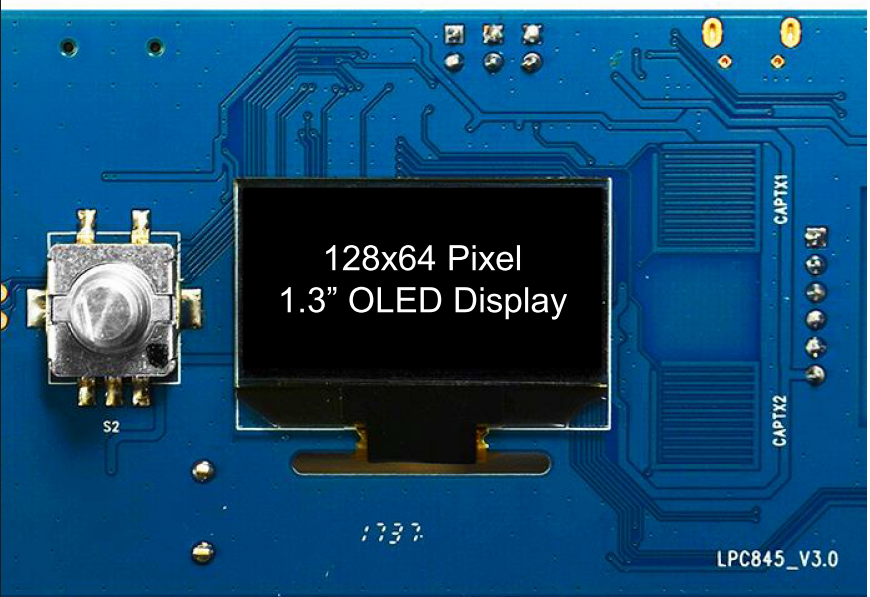
検討の結果NXPは、128×64ドット1.3“のOLED: Organic LED(有機LED)ディスプレイをMicro SDカードとSPIバス接続しています(前回投稿Swiss Army Knife Multi tool Block図参照)。
※有機LEDは、輝度や視野角、消費電力などの面で優れた特性を持つLEDです。
* * *
一方CypressのCY8CKIT-062-BLE Webinarでは、264×176ドットのE-INKディスプレイシールドが使われました。E-INKディスプレイは、電源OFFでも表示が残る画期的な表示デバイスです。しかもシールド基板なので、Arduinoコネクタを持つMCU評価ボードへの装着も可能です。
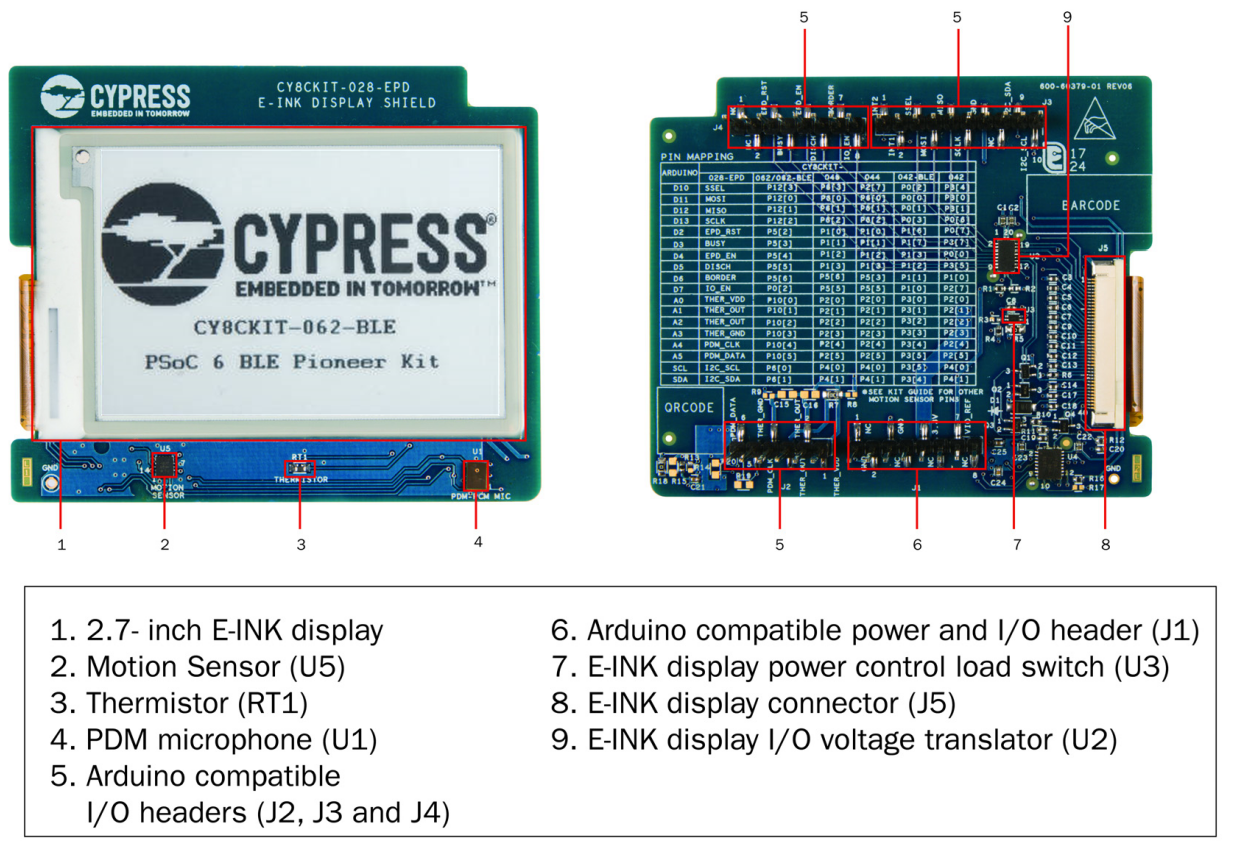
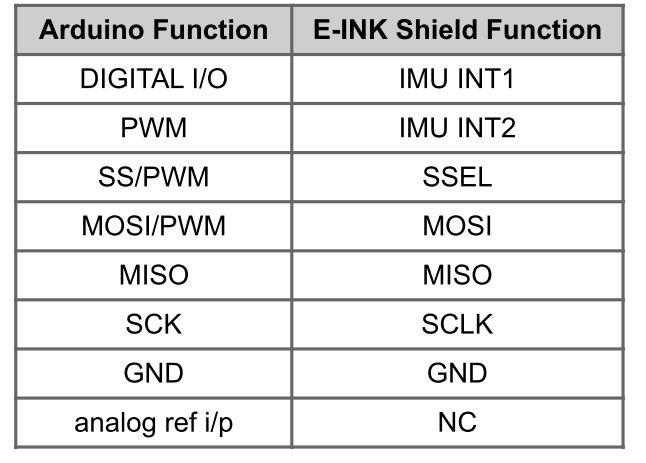
記載インタフェース信号名から、このE-INKディスプレイもSPI接続であることが解ります。
CY8CKIT-062-BLEは、このE-INKディスプレイのシールド基板付きで8,600円(Digi Key調べ)で入手可能なのでお得です。
しかし、E-INKディスプレイの制御方法が、PSoC Creatorの専用ライブラリ経由で、PSoC MCUファミリで使うには(多分)問題ありませんが、他社評価ボードでこのシールドを使う時は、専用ライブラリの詳細解析などが必要になると思います。
まとめ
SPIバスとI2Cバスの特徴と、SPI接続の最新表示デバイスを2つ示しました。
MCU評価ボードで使われた有機LEDディスプレイやE-INKディスプレイには、I2Cよりも高速なSPIバスが接続に使われています。
有機LEDディスプレイは、輝度や視野角、消費電力などの面で従来LEDディスプレイよりも優れています。
E-INKディスプレイシールドは、電源OFFでも表示が残りArduinoコネクタを持つ他社評価ボードにも装着可能ですが、Cypress制御ライブラリの解析が必要になります。
そこで、SPIバス接続を使ったArduinoシールド基板で、リッチ表示可能、サンプルソフトなどの情報多数、入手性が良く低価格、という条件で調べたところ、Adafruit(エイダフルート)の1.8“カラーTFTシールド(128×160ドット)、microSDカードスロットとジョイスティック搭載(秋月電子3,680円)を見つけました。
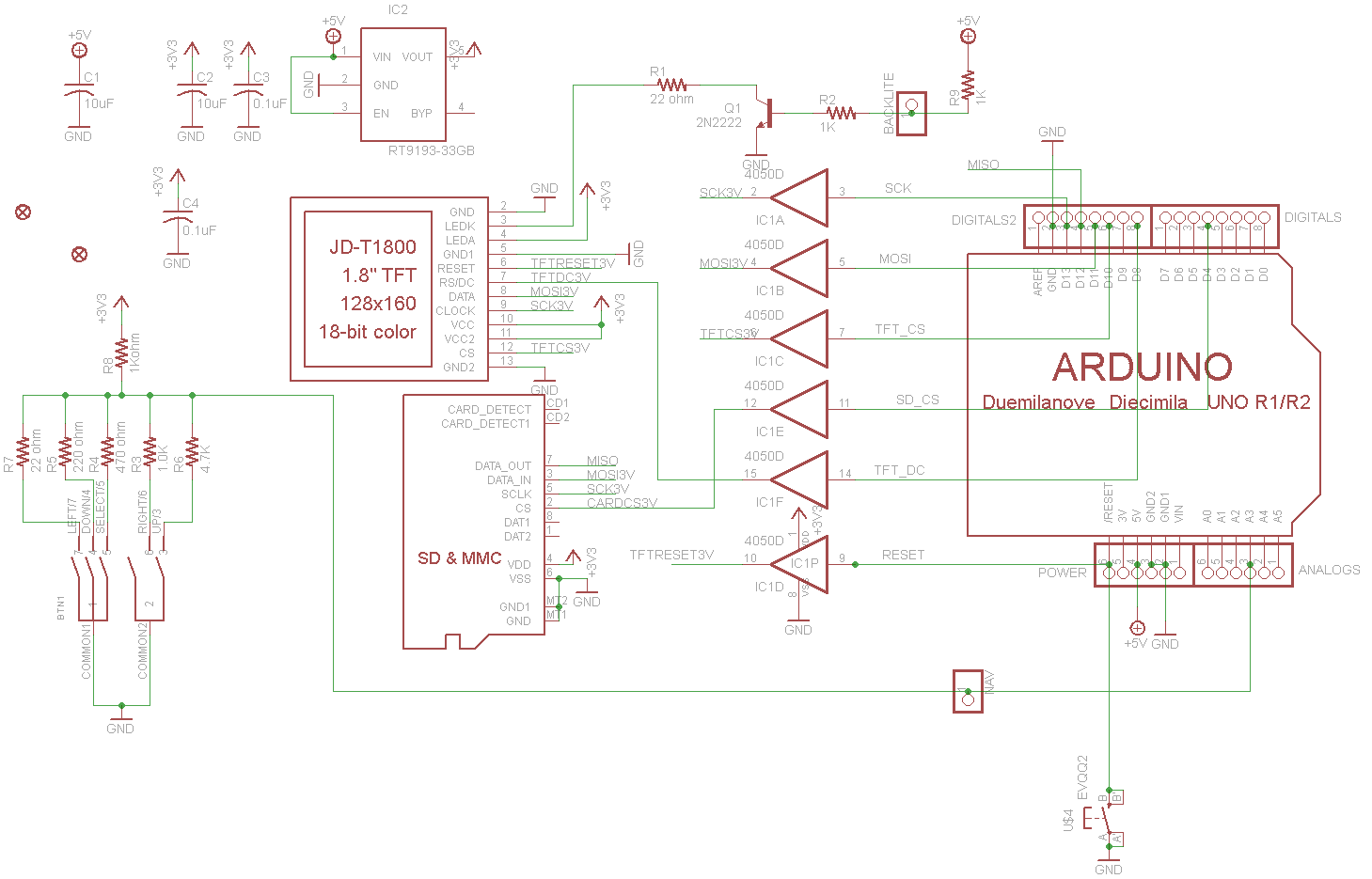
TFT コントローラICのST7735Rのデータシートも開示されていますので、OLEDやE-INKシールドよりも使いやすいと思います。
しかも、メニュー表示した画面に、付属ジョイスティックを使ってユーザが処理選択することもできるので、お勧めのSPI接続表示シールド基板です。