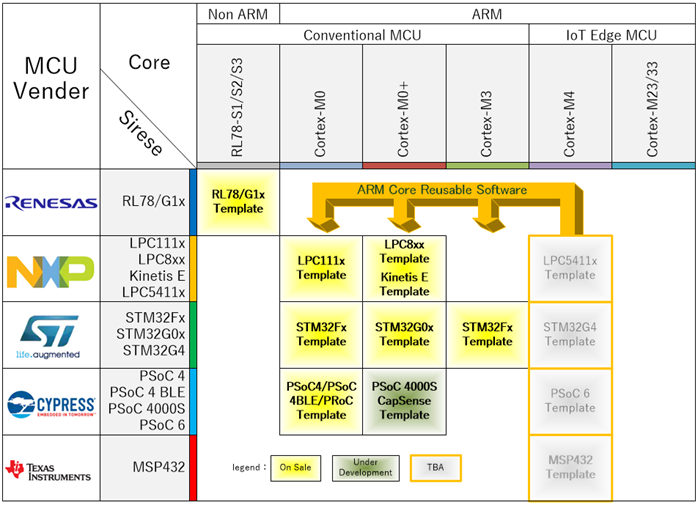
弊社は、ARM Cortex-M4コア使用のLPC5410x(NXP)、STM32G4(STM)、PSoC 6(Cypress)、MSP432(TI)各社のMCUテンプレート開発を目指しています。本稿は、各社共通のCortex-M4プロトタイプテンプレート開発指針を示します。
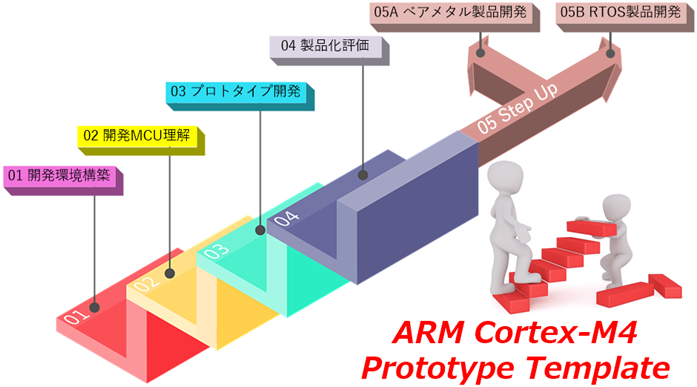
MCUプロトタイプ開発ステップ MCUプロトタイプ開発と製品化へのステップ、支援ツール プロトタイプからMCU製品開発へのステップが上図です。
IDEと評価ボードを準備、利用MCUの開発環境構築
サンプルプロジェクトを利用し、MCUや内蔵周辺回路の特徴・使い方を具体的に理解
製品処理に近いサンプルプロジェクトなどを活用し、評価ボード上でプロトタイプ開発
プロトタイプへ保守点検などの製品化処理を追加、製品時ベアメタルかRTOS利用かを評価
ステップ04評価結果でA:ベアメタル製品開発、または、B:RTOS製品開発へ発展
更に製品化へは様々なステップも必要ですが、プロトタイプ開発に絞るとこのステップになります。
Cortex-M4プロトタイプテンプレート 弊社Cortex-M4プロトタイプテンプレートは、ステップを効率的に上るための開発支援ツールです。
販売中の弊社テンプレート と同様、複数サンプルプロジェクトや開発した処理を、RTOSを使わずに時分割で起動するマルチタスク機能を備えています。RTOS 活用までの階段差が非常に高い という欠点があります。弊社テンプレートは、時分割で複数処理を起動し、初心者でも仕組みが理解できる低い階段差でマルチタスク機能を実現 します。詳細は、コチラ などをご覧ください。
販売中の従来テンプレートとCortex-M4プロトタイプテンプレートの違いが、以下です。
ステップ05以降の製品開発へも、ステップ01で構築したプロトタイプ環境をそのまま使える
下位Cortex-M0/M0+/M3ソフトウェアに対して、Cortex-M4プロトタイプ開発資産が流用できる
Cortex-M4の高性能を、プロトタイプ開発マージン(後述)に使うとこれらの違いが生じます。
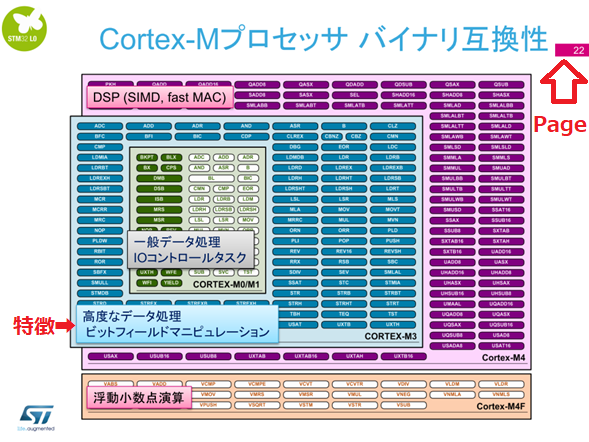
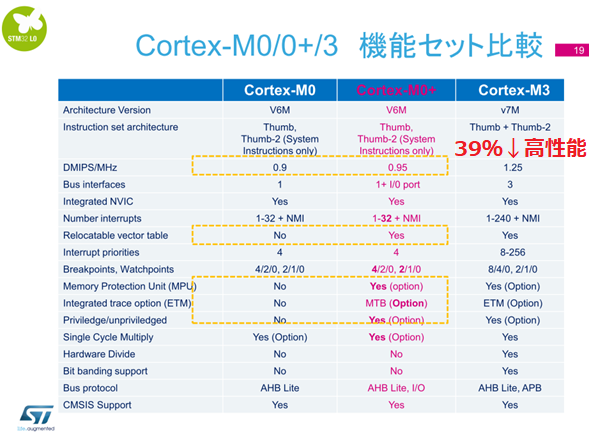
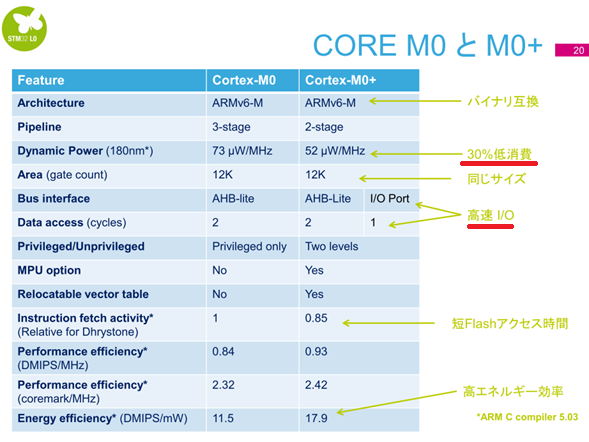
Cortex-M4コアMCUの特徴 ARM Cortex-M4は、Cortex-M0/M0+/M3とバイナリ互換です。
簡単に言うと、Cortex-Mコア開発元ARM社が推進するCMSISに則って開発したCortex-M4ソースコードやライブラリは、再コンパイルすればCortex-M0/M0+/M3へ流用・活用ができます。コチラ の2章などを参照してください。
Cortex-Mxのバイナリ互換性(出典:STM32L0(Cortex-M0+)トレーニング資料) 図から、Cortex-M4バイナリの全ては、下位Cortex-M0/M0+/M3に含まれてはいません。従って、効率的な処理やセキュリティ対策必須の高速演算を行うには、 Cortex-M4 が最適 なのは言うまでもありません。
Cortex-M4を使ったMCUは、Cortex-M0/M0+/M3 MCUに比べ動作クロックが高速で内蔵Flash/RAM容量も大きいため、ベアメタル利用だけでなく、RTOS利用も可能です。
Cortex-M4がプロトタイプ開発に最適な理由:大マージン Cortex-M4のMCUでプロトタイプ開発すれば、製品化時に必要となる処理や保守点検処理などの実装も「余裕」を持ってできます。
筆者は、このような製品化処理を、おおよそプロトタイプ処理と同程度と見積もります。つまり、製品のFlash/RAM量は、プロトタイプ時の2倍必要になります。
仮に「余裕」がありすぎオーバースペックの場合には、開発したCortex-M4プロトタイプ処理(=開発ソフトウェア資産)を、そのまま下位Cortex-M0/M0+/M3コアMCUへ流用が可能です。
一方、処理が複雑で多い場合には、RTOSで解決できるか否かの評価もCortex-M4プロトタイプなら可能です。更にIoT製品では、セキュリティ関連の(先が見えない)処理や計算量増加にも対応しなければなりません。
安全側評価なら敢えて下位Cortex-Mコアを選ばずに、Cortex-M4をそのまま製品にも使えば、処理増加にも耐えらます。
つまり、プロトタイプ開発には、初めから容量や性能の足かせが無く、製品化移行時の開発リスクも少ない高速高性能・大容量のCortex-M4 MCUが最適なのです。
製品時の処理能力やFlash/RAM量を、Cortex-M4プロトタイプで見積もった後に、製品化にステップアップすれば、適正な製品制御Cortex-Mコアを選択できます。開発ソフトウェア資産の流用性、過負荷耐力、RTOS製品開発評価ができる高性能を兼ね備えたのが、Cortex-M4を使ったプロトタイプ開発です。
問題は、価格です。
各社のCortex-M4評価ボード価格は、Cortex-M0/M0+/M3評価ボードと大差ありません。STM32MCUの評価ボード:Nucleo32シリーズ は、Cortex-Mコアが異なっても同額です。プロトタイプ開発マージンを考慮すると、たとえ評価ボードに多少の価格差があったとしても十分納得がいきます。
Cortex-M4デバイス単体価格は、Cortex-M0/M0+/M3よりは高価です。しかし、製品原価全体に占めるCortex-M4デバイス価格比は低いでしょう。IoT製品では、今後増大するセキュリティ対策や計算量増加などを考慮すると、Cortex-M4デバイスを使うメリットは大きいと思います。
Cortex-M4プロトタイプテンプレート開発指針(NXP、STM、Cypress、TI共通) Cortex-M4の特徴を活かし、下位Cortex-M0/M0+/M3間での開発ソフトウェア資産流用を考慮したCortex-M4プロトタイプテンプレート開発指針です。
Cortex-M0/M0+/M3/M4各コアに用いるテンプレート本体の共通化
プロトタイプ開発ソフトウェア資産流用性を高めるCMSISソフトウェアでの開発
製品化時ベアメタルかRTOS利用かを評価のため、Cortex-M4最高速動作のプロトタイプ開発
現在CMSISへの対応は、各社足並みが揃っているとは言えません。もしも完全にCMSISへ対応した場合は、異なるベンダ間でも開発アプリケーション互換が実現するからです。ARMコア市場が「攻めに強く、守りに弱い」ゆえんです。そういう状況でも、各社ともCMSISへのソフトウェア対応を進行中です。ベンダ独自のカスタム命令追加の動き も見られます。
本稿で示したCortex-M4プロトタイプテンプレートと異なり、弊社販売中のCortex-M0/M0+/M3テンプレートは、テンプレート利用コアで最適解を与えます。そのため、RTOS利用時や、製品化処理、セキュリティ対策などの処理が増えた時には、元々のコア処理性能や内蔵Flash/RAMに余裕が少ないため、適用デバイスでの製品化に対して、開発を続けにくい状況が発生することもありえます。
この点、Cortex-M4プロトタイプテンプレートなら、プロトタイプで構築した同じ開発環境で、RTOSも含めた製品開発へも余裕を持って対応できます。同時に、プロトタイプ開発資産の流用や活用により、Cortex-M0/M0+/M3ソフトウェア生産性も高めることができます(一石二鳥)。
ARM Cortex-M4テンプレートと開発資産流用性 弊社Cortex-M4プロトタイプテンプレートの発売時期、RTOSへの具体的対応方法などは、未定です。本ブログで各社毎の開発状況をお知らせする予定です。
あとがき:初心者や個人利用は、Cortex-M4テンプレートが最適 ソフトウェア開発初心者にCortex-M4プロトタイプテンプレート利用は、難しい(=階段を上るのが困難)と考える方がいるかもしれません。筆者は、全く逆、むしろ初心者、個人利用に最適だと思います。
理由は、Cortex-M0/M0+/M3/M4と上位になるほどコア設計が新しく、処理性能も上がるからです。初心者が、あまり上手くないコード記述をしても、コア性能が高いため問題なく処理できてしまいます。詳細は、ARM Communityの“An overview of the ARM Cortex-M processor family and comparison ”などが参考になります。
ごく簡単に言うと、自動車エンジンが、Cortex-Mコアに相当すると考えてください。
小排気量なCortex-M0より、大排気量のCortex-M4の方が、楽に運転でき、しかも、運転に最低限必要なハンドルやアクセル、ブレーキ操作は全く同じです。車(=評価ボード)の価格が同じなら、殆どの方が、余裕のある大排気量のCortex-M4を選択するでしょう。
しかも、Cortex-M4評価ボード操作の技(=開発ソフトウェア資産)は、Cortex-M0/M0+/M3へも流用できます。経済的に厳しい個人利用のプロトタイプ開発環境としては、流用範囲の広いCortex-M4 MCUテンプレートが最適と言えます。
弊社Cortex-M4プロトタイプテンプレートは、つまずき易い階段を、楽に効率的に上るための開発支援ツールです。ご期待ください。