弊社MCUテンプレートご購入者様から、ベアメタルかRTOS、どちらの開発が良いかについてご質問がありました。
ご質問者同意を得ましたので、筆者回答を一部修正、抜粋して示します。
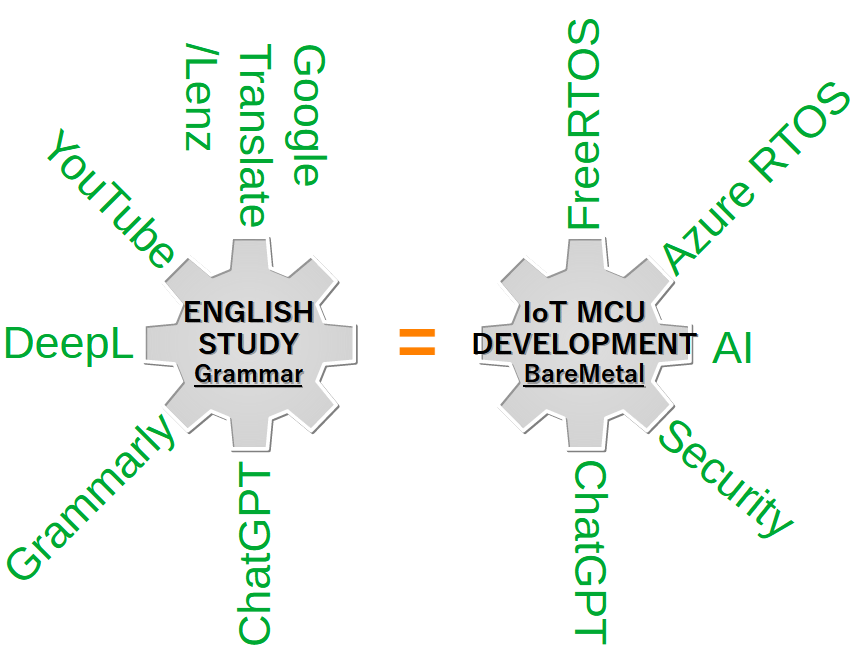
Summary:クラウド接続=RTOS開発、スタンドアロン=ベアメタル開発
AWSやAzure RTOSなどのクラウドへ接続するMCUは、RTOS(FreeRTOS/Azure RTOS)開発が必須です。クラウド接続やセキュリティ確保に、専用RTOSライブラリ利用が必要だからです。また、大規模、複数開発者の場合も、RTOS開発が向いています。
スタンドアロン動作のMCUは、ベアメタル開発をお勧めします。MCU動作を全て開発者で管理・制御できるからです。
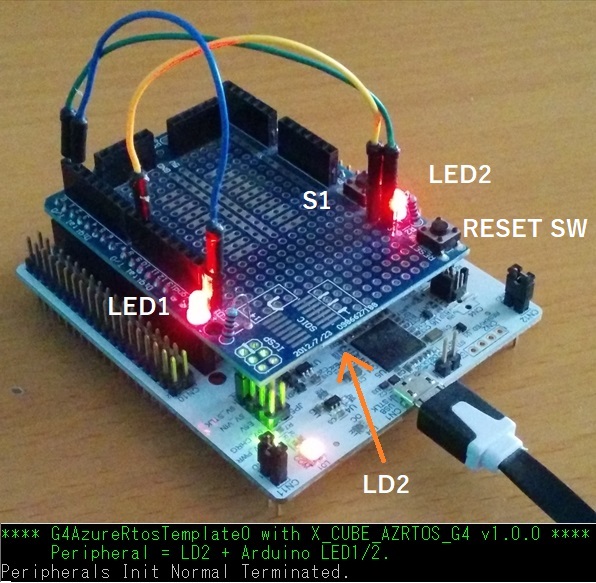
ベンダ提供サンプルコードとMCU評価ボードを活用すると、ベアメタル/RTOSどちらの開発でも、高品質・短期間で製品のプロトタイプ開発ができます。弊社MCUテンプレートは、サンプルコード活用プロトタイプ開発に適しています。
クラウド接続MCU:割込みベースRTOSタスク開発
AWS (Amazon Web Services)やAzure (Microsoft Azure Cloud Services)へ接続するMCUは、クラウド接続用に、FreeRTOSやAzure RTOS接続ライブラリの利用が前提条件です。また、高度なセキュリティ対策が求められますので、クラウド側提供セキュリティライブラリを使うことも求められます。
従って、クラウド接続MCUは、必然的にRTOS開発となります。
通信やセキュリティ以外の処理は、タクス(スレッドとも言うが、以下タスクと略)の開発が、ユーザ開発内容です。
タスクは、移植性が高い単位に機能分割し、割込みベースで作成します。複数タスクの割込み処理や優先順位を管理・処理するのが、RTOSの役目です。
RTOSが優先順位に基づいて個々のタスクをMCUに割当てることで、複数タスクの並列処理が進みます。シングルコアMCUの場合、一度に実行するタスクは1個です。従って、タスクは時分割処理です。分割タイミングが短く、しかも優先順位に基づいたタスク処理ですので、複数タスクが並列処理しているように見えます。
タスクは、別タスクのことを考慮せず独立性、移植性高く開発可能です。その代償として、RTOSが複数タスク間優先制御を行うセマフォ/ミューテックス/イベントフラグなど、また、タスク間通信を行うメッセージバッファ/メールボックスなどのRTOS独自機能を、開発タスクに組込む必要があります。
関連投稿:RTOS習得
移植性や独立性が高い開発済タスクは、ベアメタル比、ソフトウェア資産として他プロジェクトへもそのまま使えるメリットがあります。また、ソフトウェア規模が大きく、複数開発者で共同開発する時も、機能完全分離RTOS開発の方が優れると言われます。
スタンドアロンMCU:ポーリングベースベアメタル開発
RTOSが行う周辺回路の割込み処理や優先制御を、全てユーザが行うのがベアメタル開発です。
但し、デバッグや処理開発のし易さを考慮すると、ポーリングベース開発をお勧めします。
つまり、周辺回路の割込みフラグを、一旦、割込み処理待ちフラグへ置換え、この割込み処理待ちフラグをポーリングすることで処理を実行する方法です。割込み処理待ちフラグは、RAMへ展開されますので、開発処理もRAMフラグで制御でき、割込みを直接扱うよりも単体デバッグが容易になります。
ベアメタル開発は、単体デバッグ済みの複数処理を、MCU全体で上手く実行する制御部分も必要です。弊社ベアメタルMCUテンプレート、英語版MCUテンプレートは、この制御部分を提供します。
サンプルコード活用プロトタイプ開発
RTOSはタスク、ベアメタルは周辺回路制御のソフトウェア開発が必要です。
但し、ベンダは、周辺回路制御の参考となるソフトウェアを、サンプルコードとしてMCU評価ボードと共に提供します。サンプルコードは、ベンダ専門家が開発した評価ボード動作確認済み高品質コードですので、これをユーザが利用しない手はありません。
現在サンプルコードは、ベアメタル用のものが殆どです。しかし、RTOSタスク開発へも応用できます。サンプルを上手く利用することで、0から開発するよりも、短時間でソフトウェア開発ができます。
また、評価ボードMCU周りの部品配置やアートワーク配線は、処理性能過不足時のMCU交換や耐ノイズ性が高いハードウェア開発の参考書になります。
MCU開発を高品質・短期間で行うには、サンプルコードとMCU評価ボードを活用し、製品プロトタイプ開発がお勧めです。プロトタイプから製品へフィードバックをかければ、より良い製品化が可能です。
Afterword:ベアメタル開発からRTOSへステップアップ
Windowsアプリ開発時は、Windows APIの利用は当たり前です。多くの解説書もあります。
IoT MCU開発時も、FreeRTOSやAzure RTOSが当然になると思います。ただMCU開発には解説書が少なく、その理解には基礎知識が必要です。基礎がグラつくと、その上の積み重ねは非常に困難です。
MCU開発の基礎は、ベアメタル開発です。IoT普及でRTOS MCU開発も増えます。IoTに向けてRTOSを勉強しようと考える方も多いと思います。その場合は、ベアメタル開発の何をRTOSが代行し、何が得られ、何を失うか、RTOSオーバーヘッドはどの程度かを考えながら学習すると、より効率的にRTOS習得ができます。
例えば、RTOS開発には、セマフォやミューテックスなどのベアメタル開発に無い多くのRTOS機能を新に学ぶ必要があります。しかし、よく使う機能は少数です。ご自分のベアメタル手法を代行するRTOS機能から学び始め、それでも足りない機能はRTOS側に用意されていますので、順次増やしながらタスクを開発して行くと良いと思います。
ソフトウェア開発は、AI Copilot出現で激変への過渡期です。数年後には、ライブラリ組み換え作業などへ開発が変わり、不足がちなMCU開発解説もAIが代行してくれるかもしれません。
そんな全能AI過渡期でも、ご自分自身で獲得した基礎の重要性は、変わらないと筆者は考えます。